Unser Boardcomputer, genannt FMS (Flight Management System), beherbergt neben einem Cortex M3 Microcontroller, Speicher, Inertialsensoren, Drucksensor etc. auch ein GNSS Modul von uBlox. Genauer gesagt das uBlox CAM-M8Q.
Für die meisten unserer bisherigen Raketenstarts waren die Spezifikationen dieses Moduls mehr als ausreichen und hat meist während des ganzen Fluges bis hin zur Landung akkurate Positionsdaten gesendet. Für unser aktuelles Rekordprojekt The Hound werden aber die sogenannten CoCom-Limits schlagend.
In GPS technology, the term „COCOM Limits“ also refers to a limit placed on GPS tracking devices that disables tracking when the device calculates that it is moving faster than 1,000 knots (1,900 km/h; 1,200 mph) at an altitude higher than 18,000 m (59,000 ft). This was intended to prevent the use of GPS in intercontinental ballistic missile-like applications.
von Wikipedia. Laut Hersteller ist das von uns verwendete GNSS Modul für max. Altitude von 50km und max. Geschwindigkeit von 500m/s (also 1800km/h, Ma 1.45) spezifiziert. Genauere Angaben dazu, was beim überschreiten dieser Limits passiert, gibt der Hersteller nicht an. Für Raketenstarts über diesen Limits stellte sich nun die Frage: Gibt das Modul beim wieder-Unterschreiten der Limits wieder Positionsdaten aus oder muss das Modul danach neu initialisiert werden?
Diese Frage wollten wir mithilfe eines GNSS-Simulators beantworten, den wir bei RUAG Space Austria dankenswerter Weise verwenden durften. Dieser Simulator wird anstatt der GNSS-Antenne an das Modul angeschlossen und simuliert die empfangenen Satellitensignale. Dabei kann eine beliebige Trajektorie des Vehikels, Satellitenkonstellationen, Atmosphärenmodell uvm. simuliert werden. Für unseren Testfall hatten wir aus dem Simulationsprogramm OpenRocket verschiedene Trajektorien erstellt: Einen Testfall für einen Flug unterhalb den Limits und einen Testfall, wo diese Limits überschritten werden.
Nach weniger als 50s nach dem Coldstart liefert das Modul bereits seine (simulierte) Position, was sich mit den Erfahrungen im Feldtest mit aktiven GNSS-Antennen deckt.



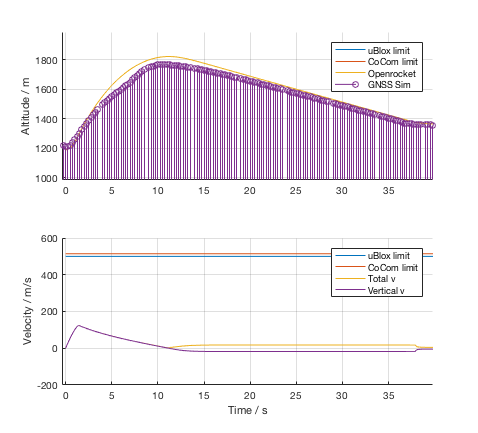
Der Test für einen Flug auf 600m AGL lief wie erwartet, über den gesamten Zeitraum hat das Modul die simulierten Positionsdaten ausgegeben:
Bei dem simulierten Flug von The Hound mit Apogee>100km zeigte sich nun folgendes Bild:
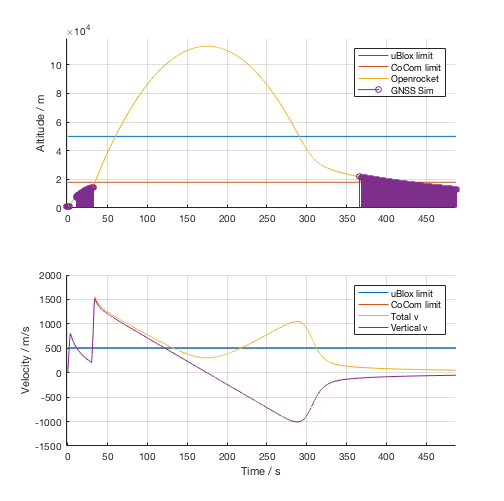
Wie erwartet gibt das Modul bei Überschreiten der max. Geschwindigkeit – während und nach der Brenndauer der beiden Motoren – sowie beim Überschreiten der max. Höhe keine Positionsdaten mehr aus. Beim Unterschreiten der Limits am Fallschirm berichtet das Modul jedoch selbstständig wieder seine Position. Die Zeitspanne von etwa 50s nach dem Unterschreiten bis zum ersten Fix ist unklar, vermutlich benötigt das verwendete Filter zur Berechnung der Positionen eine gewisse Zeit, vergleichbar zum Coldstart des Moduls.
Zusammenfassend: Das verwendete GNSS-Modul genügt unseren Anforderungen und kann nach dem Wiedereintritt am Fallschirm bereits seine Positionsdaten übermitteln. Einer erfolgreichen Lokalisierung nach der Landung steht somit nichts im Weg.
Was das Modul nicht kann bzw. darf: Die maximale Höhe am Apogee ausgeben. Dies war jedoch auch nicht beabsichtigt sondern erfolg im Post-Processing durch Auswerten der Daten der Inertialsensoren ausgehend von den letzten Positionsdaten des GNSS-Moduls sowie des max. Höhe berechnet über den Luftdruck. Die Flugbahn kann somit bis auf wenige Prozent Fehler rekonstruiert werden.