Dieser Beitrag soll einen kurzen Überblick zu unserem Rekordversuch und den Start bei BALLS in der Black Rock Desert in Nevada geben. Vorweg: Wir sind sehr stolz auf das, was wir erreichen konnten. Es war eine große Herausforderung überhaupt in Amerika Raketen zu starten und es ist uns gelungen eine äußerst komplexe Rakete, die sowohl mechanisch als auch elektronisch am Rande des technisch möglichen realisiert ist, zu starten.
Das Projekt The Hound ist eines unserer ambitioniertesten und komplexesten Projekte bisher. Ziel war und ist es mit möglichst einfachen Mitteln und mittels kommerziell erhältlicher Motoren möglichst große Höhen zu erreichen. Ursprünglich waren unser Ziel 42 km. Im Projektverlauf hat sich herausgestellt, dass weit mehr möglich sein sollte, weshalb wir uns entschieden 100 km anzustreben.
Die wesentliche Herausforderung so große Höhen zu erreichen liegt darin, eine extrem kompakte und vor allem leichte Rakete zu bauen. Wir konnten ein Treibstoff zu Gesamtmasse-Verhältnis von über 50% erreichen, was bei Raketen dieser Klasse wahrscheinlich einzigartig ist. Die kompakte Bauweise zwingt uns zu einer hochintegrierten Bordelektronik und zur Verwendung modernster Materialien und Fertigungstechnologien. So sind die Finnen aus thermischen Gründen aus 3D-gedrucktem Aluminium. Große Teile des Airframes sind aus hochtemperaturbeständigen Glasfaserverbundwerkstoffen und Aluminium. Der Motor selbst ist Teil des Airframes um unnötiges Gewicht zu sparen.
Eckdaten und Simulation
Gesamt:
- Masse: < 30 kg
- Länge: 400 cm
Oberstufe:
- Masse: ca. 10 kg
- Länge: ca. 200 cm
- Durchmesser: 7.7 cm
Unterstufe:
- Masse: ca. 20 kg
- Länge: ca. 200 cm
- Durchmesser: ca. 10 cm
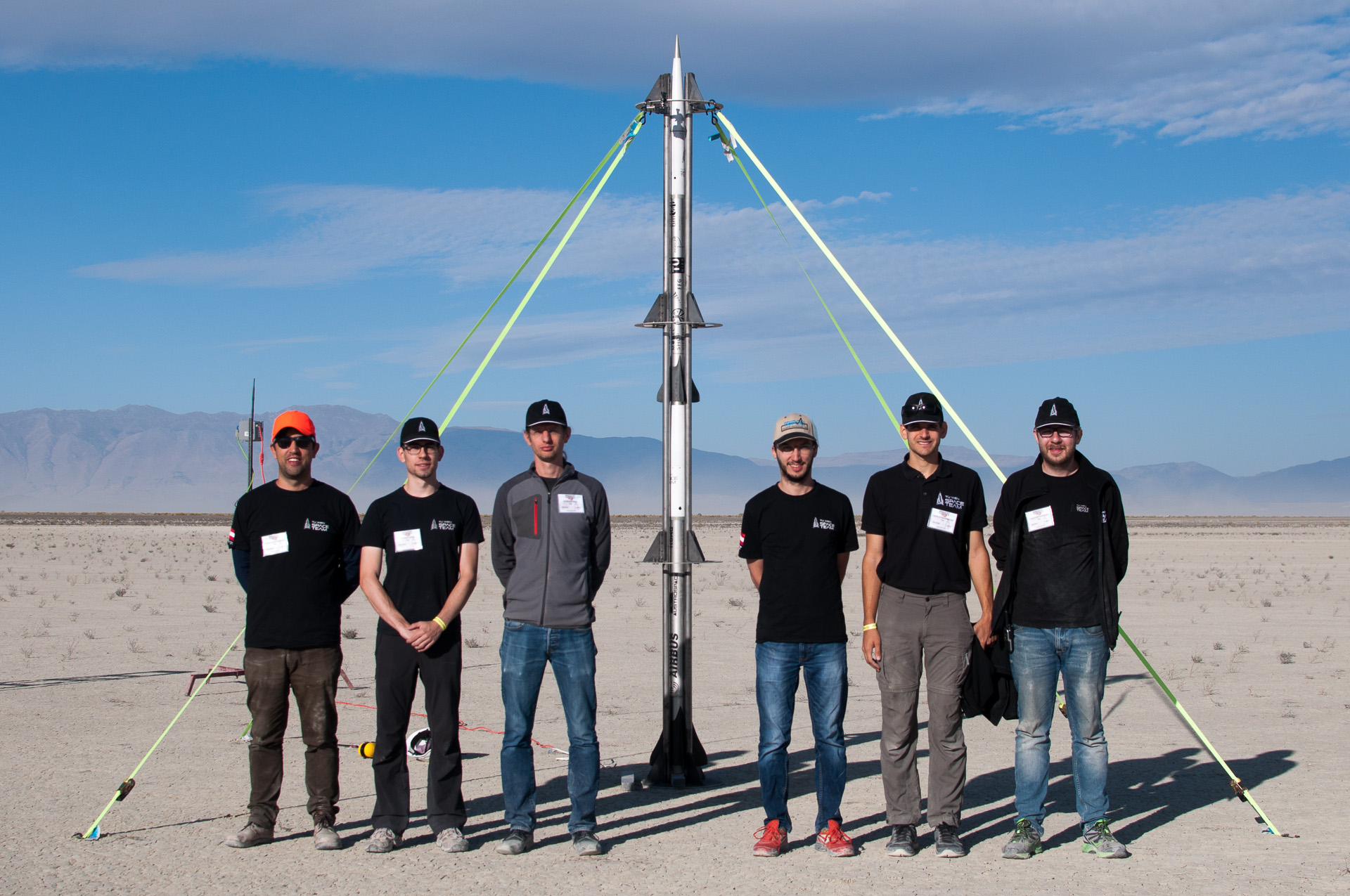
The Hound im Launchtower. Die Rakete wird beim Start über eine Länge von 3,6 m zwischen 4 Stahlrohren geführt. Die Spitze ist außerdem mit einem Styroporstück zentriert, welches beim Start herausgeworfen wird.

Simulation des Rekordfluges
Gefahren und Sicherheitsvorkehrungen
Bei der Planung von Raketenstarts verwenden wir im Space Team einen großen Teil unserer Zeit darauf, den Flug einerseits zuverlässig, andererseits aber auch sicher zu machen. Der Sicherheitsaspekt bezieht sich sowohl auf die Personen, die direkt mit der Rakete hantieren und somit auch mit der Pyrotechnik in Kontakt kommen, als auch auf die Menschen in der Umgebung – also alle Personen am Startgelände und im Umland, dh. im gesamten Bereich, den die Rakete theoretisch erreichen kann.
So gab es für das gesamte Startwochenende in der Black Rock Desert in Nevada eine Flugverbotszone mit 15 nautischen Meilen Radius (28 km) und einer Höhe von 150 000 Fuß (ca. 45 km). Zwischen 9 und 16 Uhr Ortszeit gab es Flugfenster für Flüge über 150 000 Fuß. Mittels sogenannter Dispersionsanalyse wurde sichergestellt, dass die Rakete diesen Bereich nicht verlässt und somit keine Gefährdung für Unbeteiligte darstellt. The Hound fliegt völlig ungesteuert, ein schiefes Zünden der Oberstufe kann somit zum Verlassen dieses Bereiches führen. Daher gibt es klare Kriterien für das Zünden des Oberstufenmotors: Minimalhöhe, Minimalgeschwindigkeit und maximaler Winkel von der Vertikalen.
Der zweite wesentliche Aspekt ist die Sicherheit der Space Team Mitglieder, die mit den Motoren hantieren. Dazu gibt es eine Kette unabhängiger Sicherheitsmechanismen die eine ungewollte Zündung der Motoren am Boden verhindern sollen.
Das Einschalten der Onboardelektronik passiert stufenweisen, dh. mittels eines Remove Before Flight (RBF) Pins wird die Elektronik durch stufenweises Herausziehen zuerst eingeschaltet und dann gearmed (die Zünder werden elektrisch mit den Zündkanälen verbunden). Im Zündkanal des Oberstufenmotors befindet sich ein autonomes Arming-Device (STARM) das im Default-Zustand den Zündkanal trennt. Dieses Device ist mit einem Beschleunigungssensor ausgestattet und detektiert den Liftoff der Rakete (reagiert aber zum Beispiel nicht auf ein Umfallen der Rakete). Nach Liftoff wird der Zündkanal für 60 s freigeschaltet und so ein Zünden des Motors durch den Boardcomputer erlaubt.
An diesem Wochenende sind bei anderen Teams zwei schwere Unfälle passiert, bei denen ein Mensch schwer verletzt wurde. Diese Unfälle waren auf falsches Handling der Pyrotechnik der Oberstufe von zweistufigen Raketen zurückzuführen. Dies unterstreicht wie wichtig ein sorgsamer Umgang mit der Pyrotechnik bei zweistufigen Raketen ist. Mit unserem Konzept hoffen wir das Risiko auf ein Minimum zu reduzieren.
Warum hat die Oberstufe nicht gezündet?
Laut nominalem Flugablauf wird der Booster (ein CTI N5800) gezündet und beschleunigt die gesamte Rakete auf über Mach 2. Fünf Sekunden nach Liftoff trennt sich die Oberstufe von der Unterstufe durch eine pyrotechnische Ladung und fliegt im Gleitflug auf eine Höhe von über 10 km. Wesentliches Kriterium ist hier die Motorzündung der Oberstufe noch im Überschallbereich durchzuführen. Auf dieser Höhe hat die Rakete eine Geschwindigkeit von ca. Mach 1.1 und ist bereits 20 s im Flug. Die Boardelektronik prüft nun die Flugparameter (Neigungswinkel, Geschwindigkeit und Höhe) und schaltet den Zündkanal des Motors durch. Dies ist auch passiert, wie wir anhand der analysierten Onboarddaten feststellen konnten. Der Boardcomputer konnte den Motor allerdings nicht zünden, da unser STARM (autonomes Arming Device basierend auf einer Liftoff-Detection) falsch angeschlossen war. Ziel des STARMs ist es, bei möglichst simpler Bauweise, eine Fehlzündung am Boden zu verhindern. Allerdings hat dies auch verhindert, dass uns bei den Tests vorab die falsche Verkabelung aufgefallen ist. Es fehlte aufgrund der Einfachheit des Moduls auch ein Checklistenpunkt zur korrekten Verkabelung. So wurde lediglich überprüft, ob es angeschlossen ist, was natürlich der Fall war. Wie bereits erwähnt, trennt das STARM im Default/Fehlerzustand den Zündkanal. Dies ist wohl einer der ärgerlichsten Fehler, da wir anhand unserer Daten wissen, dass wir alle anderen Bedingungen erfüllt haben und somit ein Zünden des Motors theoretisch möglich gewesen wäre. Der Vollständigkeit halber muss aber auch gesagt werden, dass auch nicht sicher ist, ob der Zünder den Motor in dieser Höhe zünden kann. Dies ist aufgrund des niedrigen Umgebungsdruckes nämlich sehr schwierig. Wir haben Vakuumtests mit unserem Zündsystem durchgeführt und sind sehr zuversichtlich, dass es funktioniert – allerdings warten wir noch auf den Beweis im Flug.

Schematische Übersicht der Elektronik in der Oberstufe
Warum wurden nur ca. 10% der Flughöhe erreicht?
The Hound ist eine Rakete, die den Rand des technisch möglichen ausreizen soll. Dazu braucht es Optimierungen an allen Ecken und Enden. Das zweistufige Konzept ermöglicht es vieles an unnötiger Masse relativ schnell loszuwerden. Masse ist für so hohe Flughöhen der wichtigste Optimierungsparameter. Der Motor der ersten Stufe hatte lediglich eine Aufgabe, nämlich die zweite Stufe auf eine Höhe zu katapultieren, bei der möglichst geringer Luftwiderstand herrscht um dann mit extrem hoher Geschwindigkeit (Mach 5 bzw 1,5 km/s) auf die angestrebte Höhe von 100 km zu kommen. Die Oberstufe hat ohne zu Zünden gerade genug Energie um auf gut 14 km Höhe zu fliegen (ungefähr die erreichte Höhe). Wenn sie allerdings auf 10 km Höhe gezündet wird, ändert sich dies massiv: Der Motor erzeugt einerseits so viel Schub, dass die Rakete mit mehr als der 40-fachen Erdbeschleunigung in gut 4.5 s auf die genannten 1,5 km/s beschleunigt wird, andererseits verliert die Oberstufe dadurch aber auch gut die Hälfte ihrer Masse und kann somit mehr als 100 km Höhe erreichen.

Simulation ohne Oberstufenzündung
Was passierte im weiteren Verlauf des Fluges?
Mittels unserer selbstentwickelten Telemetriemodule konnten wir den gesamten Flug beider Raketenstufen am Boden mitverfolgen. Sowohl die Oberstufe als auch die Unterstufe haben selbstständig den Gipfelpunkt erkannt und den Vorschirm ausgeworfen. Beim Booster wurde auf 300 m Höhe auch noch ein größerer Hauptschirm geöffnet. Dies war auch für die Oberstufe vorgesehen, allerdings gab es hier eine Fehlfunktion des dafür zuständigen, unabhängigen Moduls. Die Logdaten sind hier nicht schlüssig und es wird weitere Analysen brauchen um den Fehler einzugrenzen. Elektrisch ist das Modul in Ordnung. Da die Oberstufe mit gut 40 m/s mangels Hauptschirm und aufgrund der doppelt so hohen Masse gelandet ist (nominal sind 10 m/s bzw mit doppelter Masse 15 m/s), wurden die Finnen beschädigt. Spitze und Elektronik sind intakt.
Der Booster ist bis auf ein paar Kratzer, da er am Fallschirm gut 100 m durch den Wüstensand geschleift wurde, unbeschädigt. Gefunden wurden die Teile mittels GPS Positionen, die an die Bodenstationen übermittelt wurden.
Gemessene Flugdaten
V-max: 800 m/s, Mach 2,4
Alt.-max: 13000 m (42650 ft) AGL
Accel.-max: 29.5 g
Zeit bis zum Gipfelpunkt: 48 s
Gesamte Flugzeit: 310 s
Landung beider Stufen ca. 10 km vom Startort entfernt. Die GPS Position wurde uns von unseren LoRa-Funkmodulen während des gesamten Fluges übermittelt.
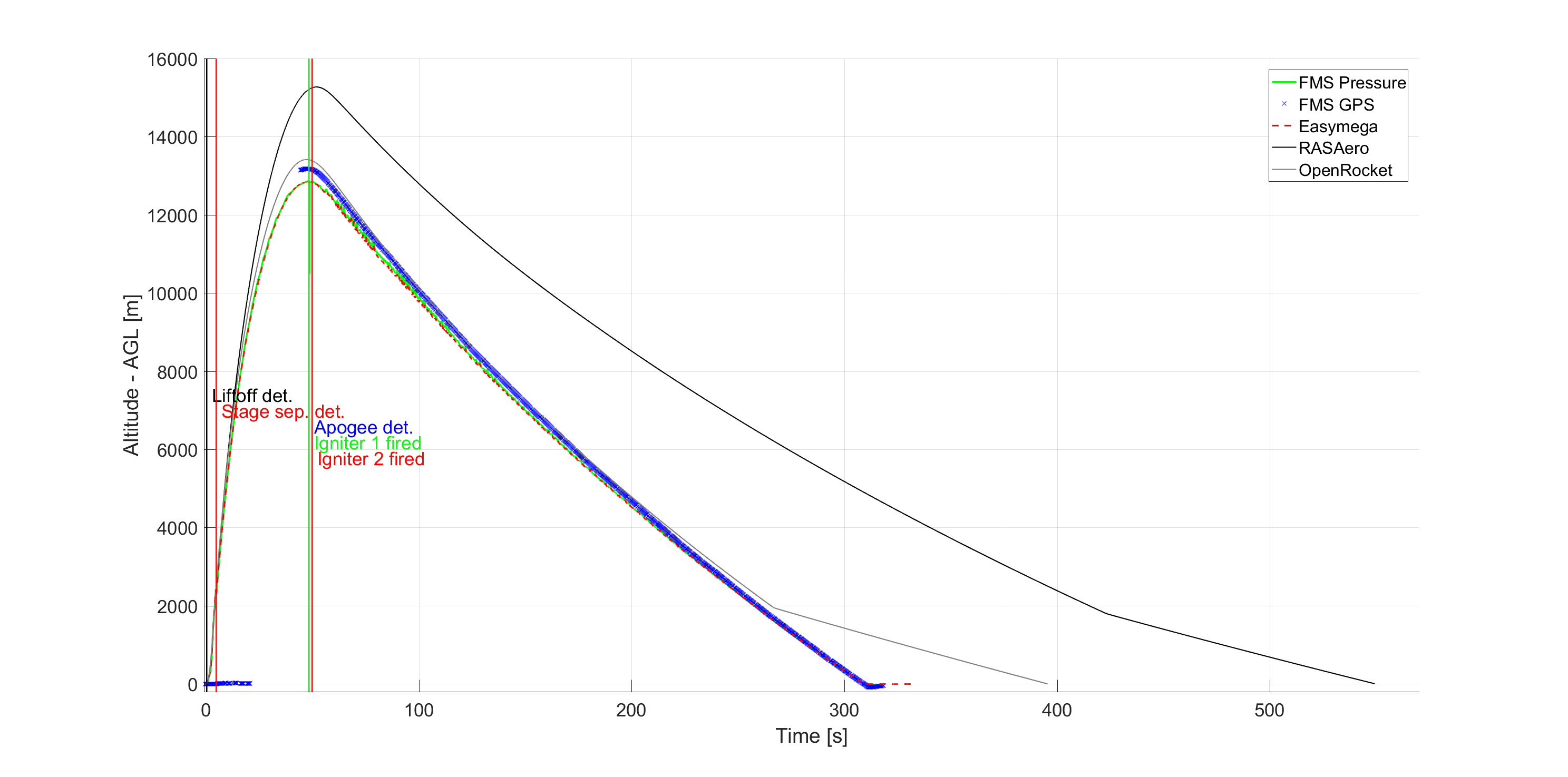
Gemessene Höhe im Vergleich zu den Simulationen mit RASAero und OpenRocket. Igniter 1 und 2 werfen den Bergungsfallschirm aus (der Hauptschirm wird mittels Linecutter unabhängig geöffnet).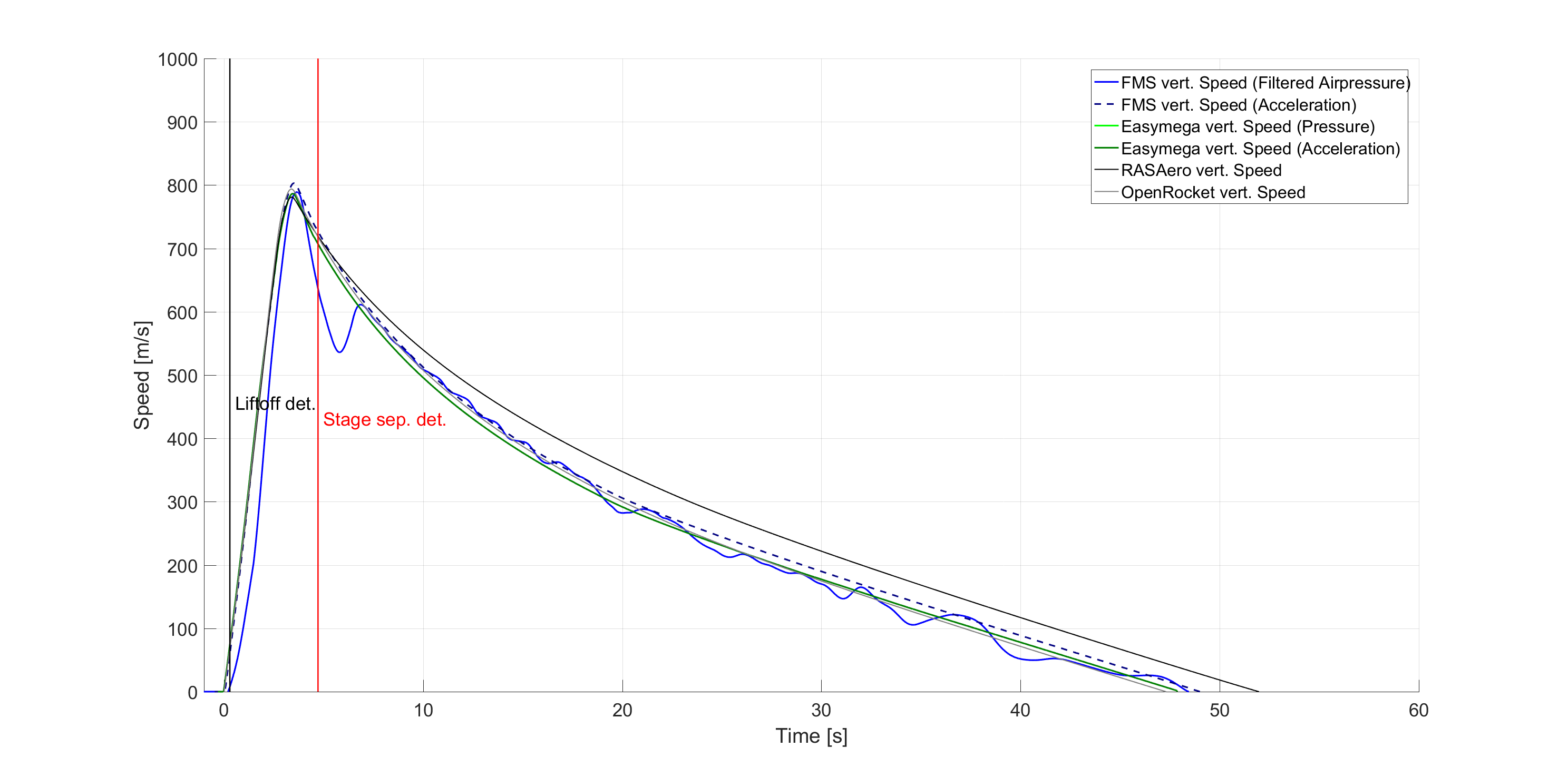
Berechnete Geschwindigkeit im Vergleich zu den Simulationen mit RASAero und OpenRocket.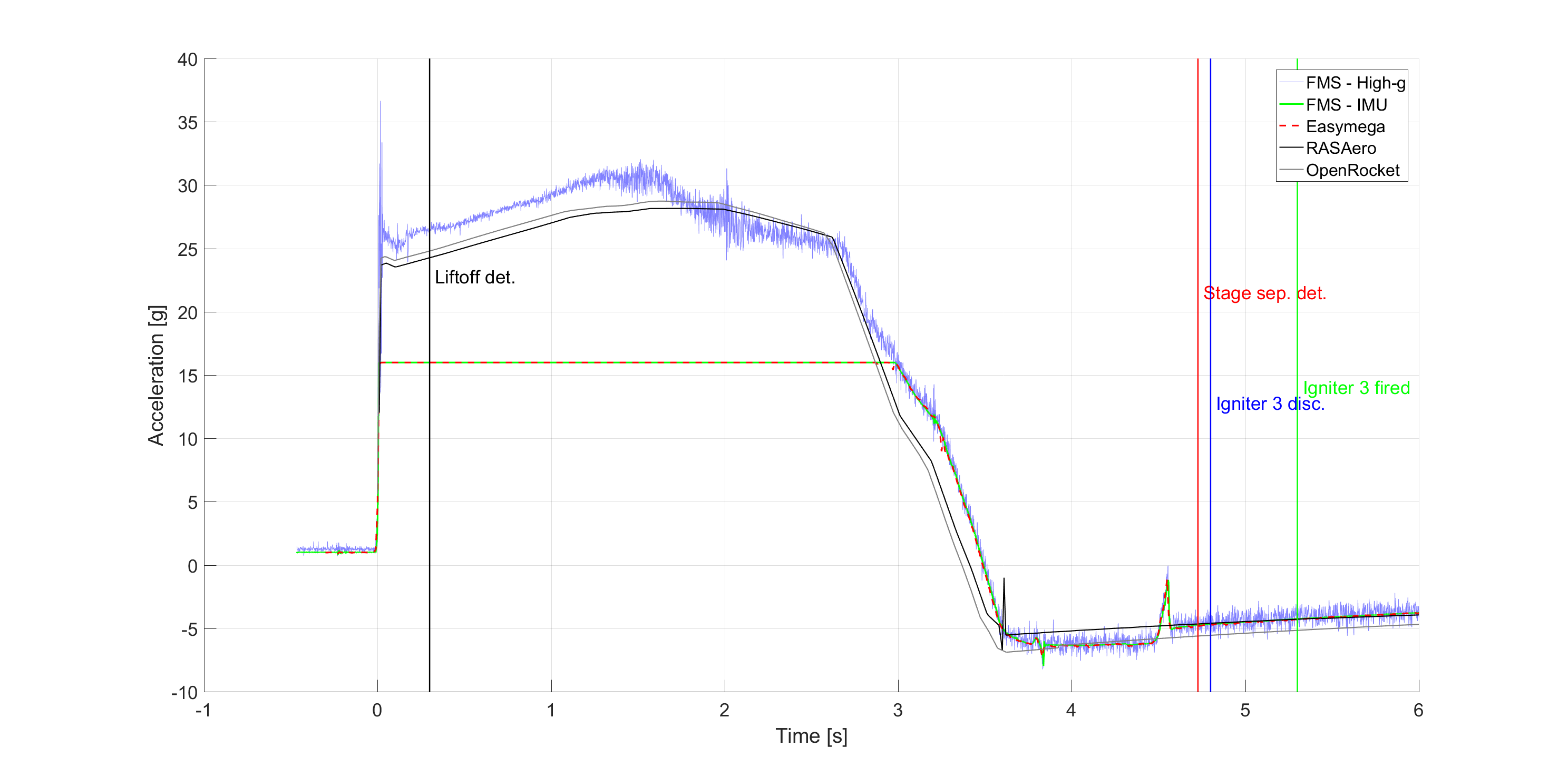
Gemessene Beschleunigung im Vergleich zu den Simulationen mit RASAero und OpenRocket. Igniter 3 war eigentlich dazu gedacht, die zwei Raketenstufen zu trennen, wir haben aber auch mit einer möglichen Drag-Separation gerechnet. Am zeitlichen Ablauf von Separation, Abtrennung des Igniters und eigentlicher Zündung des Igniters sieht man, dass sich die Stufen selbstständig aufgrund des unterschiedlichen Luftwiderstandes getrennt haben. Der Igniter wurde im Zuge dieser Trennung abgerissen. Dies ist völlig unproblematisch und auch nicht unerwünscht.
Videos
Bilder




































Bilanz
[table id=16 /]
Wie geht es weiter?
Es werden noch weitere Analysen und Diskussionen folgen, um aus unseren Fehlern zu lernen. Wir konnten viel Erfahrung sammeln und viele Kontakte in die US-Amerikanische Raketenszene knüpfen. Außerdem haben wir nun wertvolle Flugdaten, die mit unseren Simulationen abgeglichen werden können und uns dabei helfen werden, weitere sinnvolle Tests mit unseren Raketen durchzuführen. Es wird noch diskutiert ob und wann es zu einem weiteren Versuch kommen wird.
Ein wesentlicher Punkt ist auch die Erschließung weiterer Start und Testmöglichkeiten in der Nähe von Wien um künftig noch besser vorbereitet sein zu können. Wir hoffen unter anderem darauf künftig auch am Gelände des österreichischen Bundesheeres in Allentsteig Testflüge durchzuführen. Dort wären theoretisch Starts auf bis zu 15 km Höhe möglich, allerdings wurden unsere bisherigen Anfragen alle negativ beantwortet. Weitere Testmöglichkeiten in Europa sind sehr rar und oft auch mit sehr hohen Gebühren im 5 bis 6-stelligen Eurobereich verbunden.