across austria
Die Mission, mit einem wasserstoffbetriebenen Flugzeug durch Österreich von Grenze zu Grenze autonom zu fliegen, soll wichtige Zukunftstechnologien für die Luftfahrt demonstrieren. Mit seiner hohen Energiedichte stellt Wasserstoff, neben synthetischen Flüssigtreibstoffen und erhofften Potentialen der Batterietechnologie, eine realistische Lösung für die grüne Luftfahrt der Zukunft dar. Der BVLOS-Betrieb (beyond visual line of sight) von autonomen Luftfahrzeugen eröffnet eine Vielzahl an Möglichkeiten für Such- und Rettungsdienste, Logistik, urbanen Verkehr und die Anbindung von entlegenen Regionen.
In diesem Kontext will das TU Space Team in enger Kooperation mit der TU Wien und Unterstützung von Politik, Behörden und Industrie die Themen Wasserstoff und BVLOS in der Luftfahrt vorantreiben.

hydrogen
Durch die Verwendung einer Brennstoffzelle in Kombination mit Wasserstoff soll eine umweltfreundliche Alternative zu Kerosin in der Luftfahrt demonstriert werden. Mit einer 2,8-fach höheren gravimetrischen Energiedichte als Kerosin ermöglicht es Wasserstoff, bei gleicher Reichweite eine entsprechend höhere Nutzlast zu transportieren – oder bei gleicher Treibstoffmasse deutlich größere Strecken zurückzulegen. Auch im Vergleich zu LiPo-Akkus, die bei Drohnen häufig verwendet werden, kann mehr als die doppelte Reichweite zurückgelegt werden.
Als Wasserstoffspeicher soll ein 6,8 L Composite-Drucktank (Typ IV) eingebaut werden, der bei 3,1 kg Gesamtgewicht 140 g gasförmigen Wasserstoff enthält (ca. 4,6 kWh). Damit ist eine potentielle Reichweite von über 600 km möglich, also eine West-Ost-Überquerung von Österreich.
In einer PEM-Brennstoffzelle reagiert Wasserstoff mit Sauerstoff aus der Umgebung in einer elektrochemischen Reaktion und wird in Wasserdampf umgewandelt – dabei entstehen Wärme und elektrischen Strom. Die Abkürzung PEM steht dabei für ”proton exchange membrane” und bezeichnet einen Brennstoffzellentypen, der durch seine hohe Energiedichte und seinen Niedertemperaturbetrieb (70-90 °C) besonders im Transportbereich von Interesse ist. In hybrider Kombination mit einer 6S-LiPo Batterie können kurzfristige Leistungsspitzen bis zu 1 kW abgedeckt werden. Bei Leistungsanforderungen unter der Nominalleistung der Brennstoffzelle automatisch aufgeladen. Sollte es im Flugbetrieb zu einem Ausfall der Brennstoffzelle kommen, ermöglicht die Batterie außerdem bis zu zwei Minuten Flugzeit, um sicher zu landen.
Während der Airframe entwickelt und gefertigt wird, wird das Brennstoffzellensystem gründlich am Boden getestet und bietet die Möglichkeit, Erfahrung im Umgang mit Wasserstoff zu sammeln.


bvlos
BVLOS (beyond visual line of sight) – auf Deutsch “außerhalb direkten Sichtkontakts” – ist die rechtliche Bezeichnung für automatische Drohnenflüge, bei denen kein Pilot mehr jedes Flugmanöver direkt mit einer Fernbedienung steuert. Hier geht es also um die für dieses Projekt essenzielle Frage, unter welchen Voraussetzungen ein Flugzeug überhaupt autonom quer durch Österreich fliegen darf. Die Antwort dazu findet sich in der neuen Drohnenverordnung der EU, die seit 2020 von den Mitgliedsstaaten umgesetzt wird und erstmals rechtliche Rahmenbedingungen für einen solchen BVLOS Flug schafft. Dazu wird in enger Kooperation mit der Austro Control, die für die Luftraumsicherung in Österreich zuständig ist, ein Konzept ausgearbeitet. Des Weiteren werden Risikoanalysen durchgeführt, um sicherzustellen, dass ein autonomer Flug quer durch Österreich keine Gefährdung darstellt und ein höchstmögliches Level an Sicherheit und Zuverlässigkeit bei der Durchführung garantiert werden kann.
aircraft design
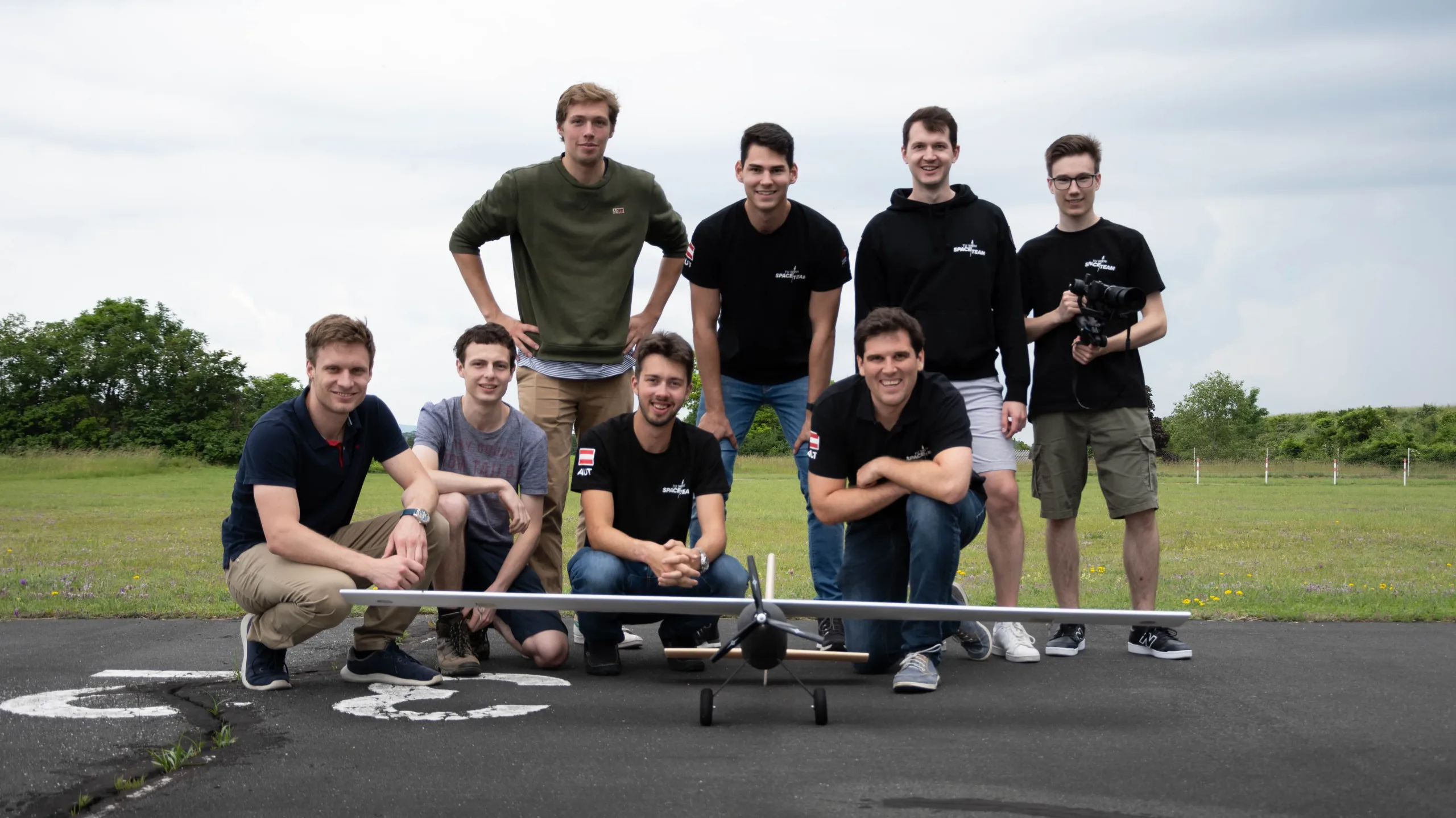
Hindenburg
Die „Hindenburg“ wurde als Testplattform für alle Komponenten, Missionsplanung etc. gebaut. Das Flugzeug wurde primär durch additive Fertigungstechnologien hergestellt, wobei die Tragfläche aus einem mit Glasfasern ummantelten Schaumkern besteht. Um ausreichend Platz für die zu testenden Komponenten zu bieten, wurde der Rumpf besonders groß dimensioniert und erinnert dadurch an ein Luftschiff.



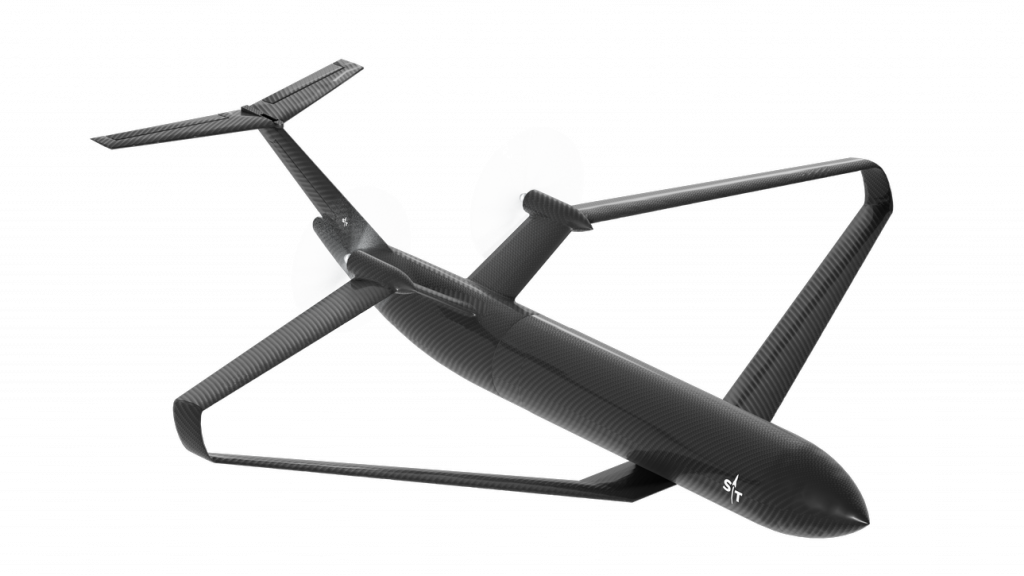
Agility
Hierbei handelt es sich um die zweite Iteration der Drohne, welche bereits überwiegend dem finalen Design entspricht und mit einem Boxwing umgesetzt wird. Der Rumpf ist in der Mitte teilbar und bietet Platz für die Brennstoffzelle, den Wasserstofftank und für alle elektronischen Komponenten. Die Motoren sind in zwei Triebwerksgondeln an der hinteren Tragfläche befestigt und das Seiten- und Höhenleitwerk ist in einer Y-Anordnung realisiert, um sich ideal in die Geometrie der Tragflächen einzufügen. Konstruktion und Fertigung sind derzeit im Laufen.
control
In den Bereich Control fällt alles, was mit der Flugsteuerung zu tun hat. Das Flugzeug wird in der Lage sein, bis auf Start und Landung, komplett autonom zu fliegen. Dies ist durch eine Reihe von Sensoren, beispielsweise für die Flughöhe, die Fluggeschwindigkeit oder den Luftdruck, möglich. Auch der Status der Brennstoffzelle und der Wasserstofffüllstand werden durchgehend überwacht. Ein Autopilot berechnet auf Grundlage dieser Daten, welche Steuerungsflächen bewegt werden müssen und wie viel Motorleistung notwendig ist, um das Flugzeug auf der geplanten Route zu halten. Als Autopilot fungiert ein Cubepilot, auf dem die Software Ardupilot läuft.


telemetry
Besonders für BVLOS ist eine dauerhafte Datenverbindung mit Telemetriedaten wichtig. Handelsübliche Funkverbindungen scheiden aufgrund der geforderten Reichweite aus, deshalb wird voraussichtlich eine Kombination aus Mobilfunk und Satellitenverbindung zum Einsatz kommen. Dabei liegt hier die Betonung auf dem und, da alle Datenpunkte (ca. 1000 Punkte, die zehn Mal pro Sekunde übertragen werden) über beide Datenverbindungen gesendet werden, um einen Ausfall einer Teilkomponente abfangen zu können.
Eine weitere Schwierigkeit ist die Darstellung der Daten: Jeder Verantwortungsbereich, von Navigation bis Brennstoffzellenbetrieb, interessiert sich für andere Datensätze und beobachtet diese über unterschiedliche Zeiträume. Für die Überwachung des Füllstands des Wasserstofftanks ist ein Zeitraum von einer halben Stunde interessant, während für die Flugüberwachung eher die letzte Minute von Bedeutung ist. Um alle diese Anforderungen erfüllen zu können, wird openMCT von der NASA eingesetzt. In dieser Software kann jeder Verantwortungsbereich sein eigenes Dashboard zusammenstellen.
mission planning
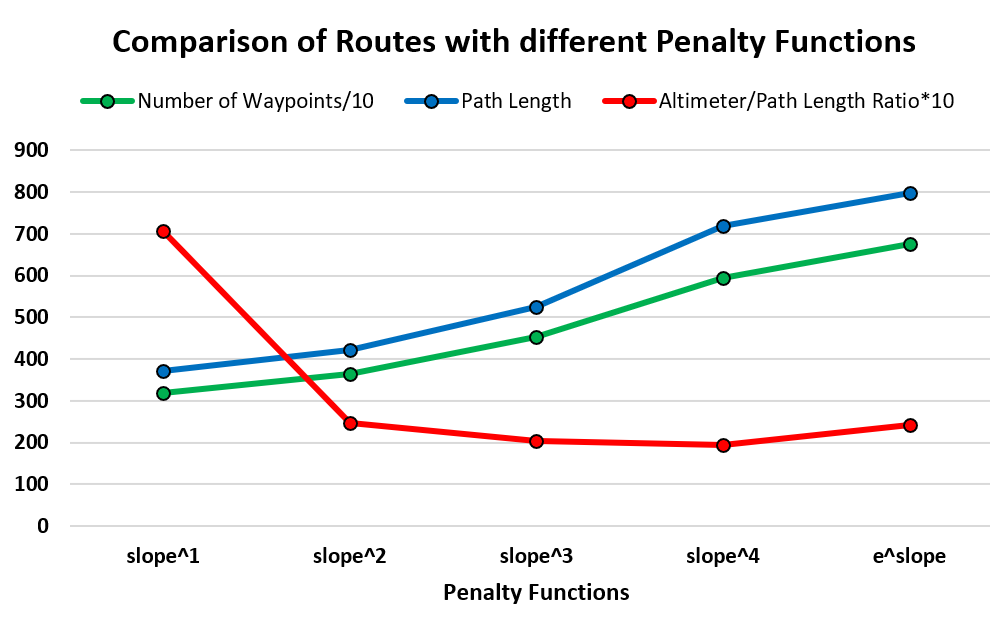
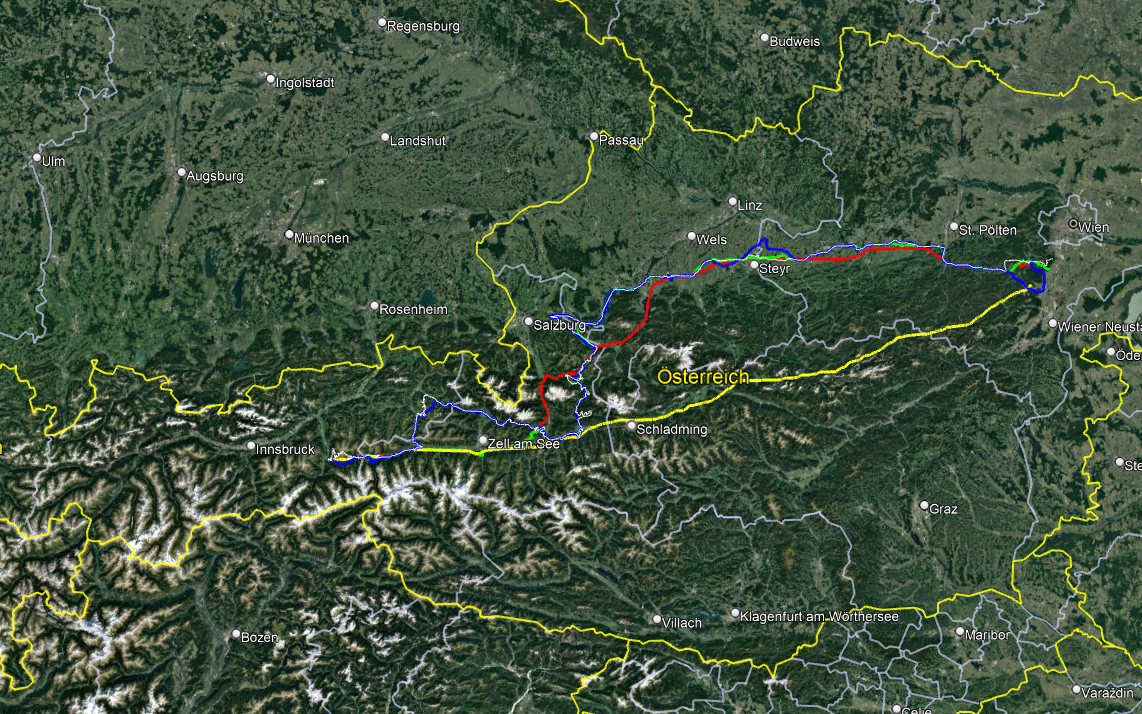
Die Route, welche das Flugzeug am Ende autonom absolvieren soll, muss vorher festgelegt werden. Dabei gilt es zwischen Start und Zielpunkt einen Weg zu finden, welcher einer Reihe von Anforderungen entspricht: Die Route soll nicht über dicht besiedeltes Gebiet führen, große Straßen meiden, Autobahnen am besten gar nicht überqueren, oder einen Tunnel abpassen und sonstige Flugsperrzonen meiden.
Dabei muss allerdings auch auf den Energiehaushalt geachtet werden: Es dürfen keine zu starken Steigungen geplant werden, sonst liefert die Brennstoffzelle nicht ausreichend Energie. Trotzdem soll der Kurs möglichst direkt zwischen Start und Zielpunkt verlaufen.
Das ist also ein großes, mehrdimensionales Optimierungsproblem, für das wir Software entwickeln und mit Partnern zusammenarbeiten, um aktuellste Daten für dieses Projekt verwenden zu können. Der Grundbaustein für diese Berechnungen ist eine Satelliten-Höhenanalyse von Österreich. Dazu kommen Siedlungs- und Autobahn-Daten, sowie sonstige Sperrzonen, z.B. Flughäfen. Mit diesen Informationen können nach verschiedenen Kriterien optimierte Strecken generiert werden, deren Wegpunkte dann in Ardupilot verwendet werden, um AcrossAustria zu fliegen.