across austria
The mission to fly autonomously from border to border across Austria in a hydrogen-powered aircraft, aims to demonstrate important future technologies for aviation.With its high energy density, hydrogen represents a realistic solution for green aviation of the future, in addition to synthetic liquid fuels and the hoped-for potential of battery technology. BVLOS (beyond visual line of sight) operation of autonomous aircraft opens up a multitude of possibilities for search and rescue, logistics, urban mobility and the connection of more remote regions. In this context, TU Space Team wants to drive forward the topics hydrogen and BVLOS in aviation in close cooperation with TU Wien and with the support of politics, authorities and industry.

hydrogen
By using a fuel cell in combination with hydrogen, an environmentally friendly alternative to kerosene in aviation is intended to be demonstrated. With a 2.8 times higher gravimetric energy density than kerosene, hydrogen allows for transporting a correspondingly higher payload at the same range – or covering significantly longer distances with the same fuel mass. In comparison to LiPo batteries, which are commonly used in drones, hydrogen enables more than double the range.
A 6.8 L composite pressure tank (Type IV) is planned to be installed as a hydrogen storage, containing 140 g of gaseous hydrogen (approximately 4.6 kWh) at a total weight of 3.1 kg. This configuration allows for a potential range of over 600 km, equivalent to a west-east flight across Austria.
In a PEM fuel cell, hydrogen reacts with oxygen from the surroundings in an electrochemical reaction, transforming into water vapor – thereby producing heat and electrical power. The acronym PEM is short for “proton exchange membrane” and refers to a type of fuel cell that is of particular interest in the transportation sector due to its high energy density and low-temperature operation (70-90 °C). In a hybrid combination with a 6S LiPo battery, short-term power peaks of up to 1 kW can be covered. During periods of power demand below the nominal output of the fuel cell, the battery is automatically recharged. In case of a fuel cell failure during flight, the battery also provides up to two minutes of flight time for a safe landing.
While the airframe is being developed and manufactured, the fuel cell system undergoes thorough ground testing, providing an opportunity to gain experience in handling hydrogen.


bvlos
BVLOS (beyond visual line of sight) is the legal designation for autonomous drone flights, where the drone is no longer directly operated by a pilot via a remote control. Therefore, we are dealing here with a question which is essential for this project: Which requirements must be fulfilled in order to carry out such a flight across Austria? The answer can be found in the EU’s drone regulation, which has been adopted by the member states since 2020 and which for the first time sets up a legal basis for such a flight BVLOS. We are working in close cooperation with Austro Control, Austria’s air traffic control agency, to develop a concept and carry out risk analysis to guarantee that our flight across Austria is not a danger to the public and reaches a maximum level of safety and reliability.
aircraft design
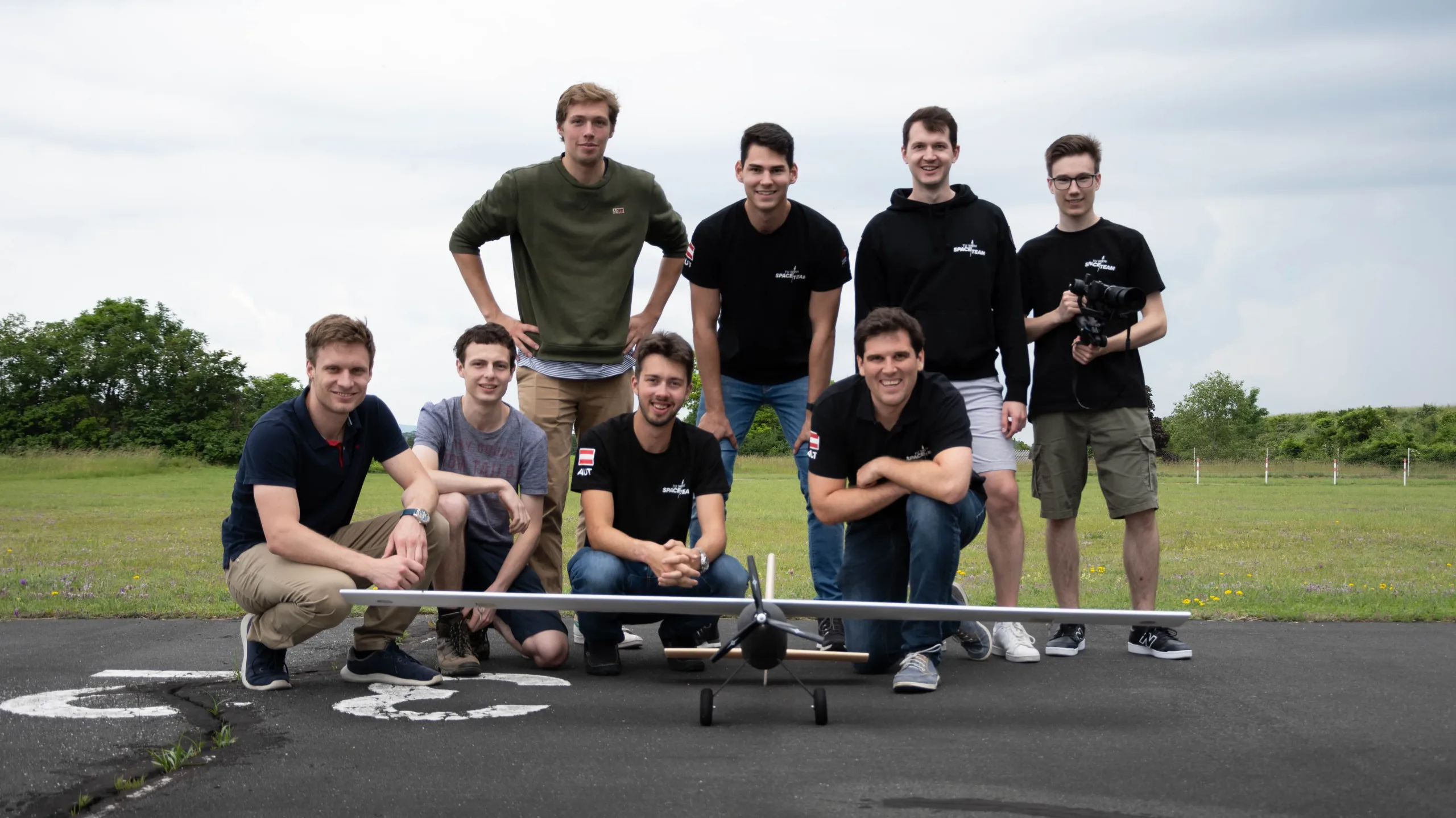
Hindenburg
“Hindenburg” was built as a testing platform for all components, mission planning and so on. The aircraft was primarily manufactured using additive manufacturing technologies, with the wing composed of a foam core encased in glass fibers. To provide sufficient space for the components being tested, the fuselage was dimensioned exceptionally large, which reminds of an airship.



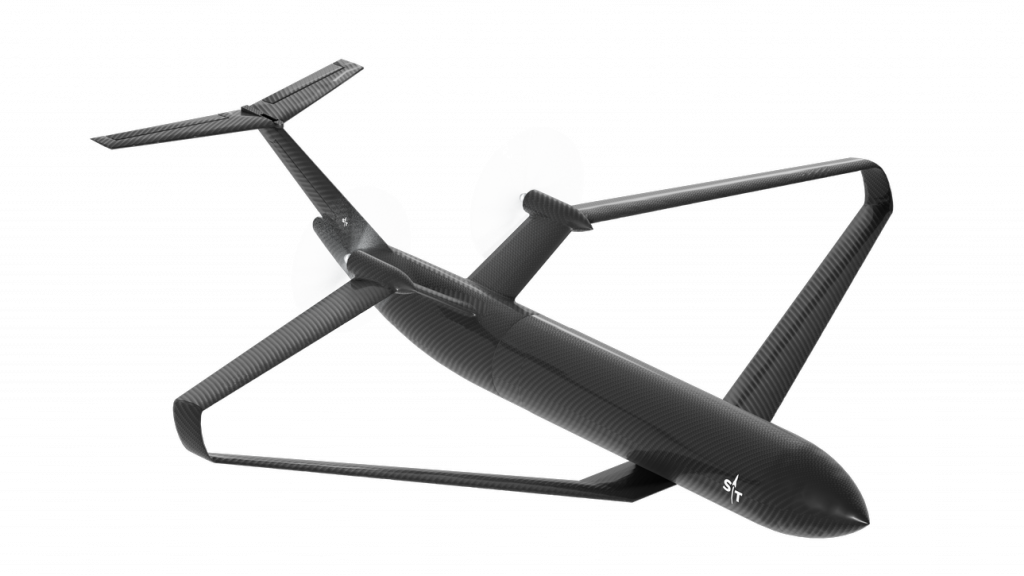
Agility
This is the second iteration of the drone, which already closely resembles the final design and is implemented with a box wing. The fuselage is split in the middle, providing space for the fuel cell, the hydrogen tank and all electronic components. The engines are attached to two nacelles on the rear wing, and the vertical and horizontal tail assembly is arranged in a Y-configuration to seamlessly integrate with the wing’s geometry. Construction and manufacturing are currently underway.
control
The control group is responsible for everything regarding the steering of the plane. The aircraft will be able to fly completely autonomously, except for take-off and landing. This is possible due to a number of installed sensors, such as altitude sensor, airspeed sensor and air pressure sensor. The status of the fuel cell and the hydrogen level are also continuously monitored. Based on this data, an autopilot calculates which control surfaces need to be actuated and how much engine power is required to keep the aircraft on the planned route. The autopilot is a Cubepilot running the Ardupilot software.


telemetry
A permanent data connection with telemetry data is particularly important for BVLOS operation. Commercially available radio connections are ruled out due to the required range, so a combination of mobile radio and satellite connection will probably be used. The emphasis here is on and, as all data points (about 1000 points which are transmitted ten times per second) are sent via both data connections in order to be able to intercept a failure of a partial component.
Another difficulty is the presentation of the data. Each area of responsibility, from navigation to fuel cell operation, is interested in different data sets and observes them over different periods of time. For monitoring the level of the hydrogen tank, a period of half an hour is interesting, while for flight monitoring it is rather the last minute that is important. To meet all these requirements, openMCT is used, which is developed by NASA. In this software, each area of responsibility can compile its own dashboard.
mission planning
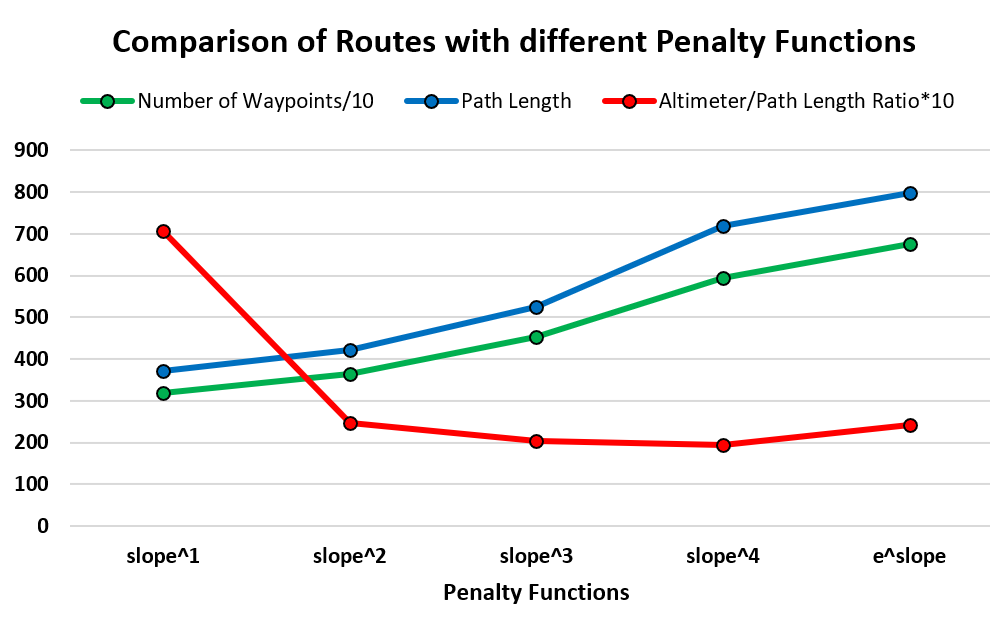
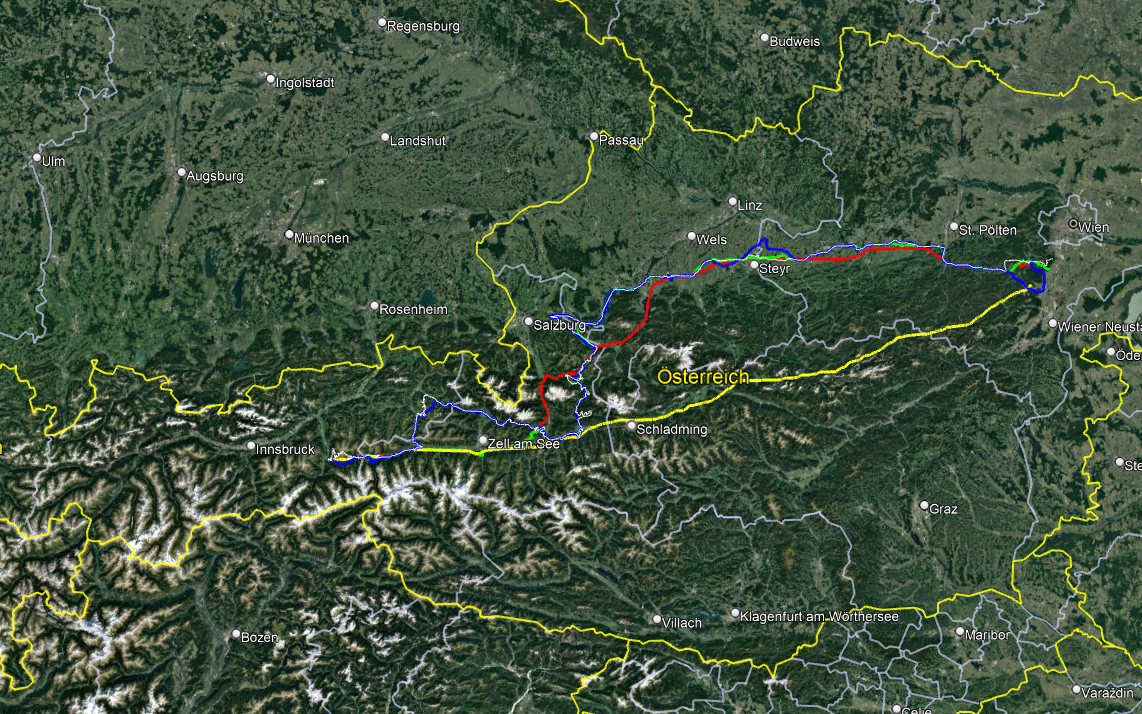
The route that the aircraft is ultimately intended to autonomously complete must be predetermined. In doing so, it is necessary to find a path between the starting and destination points that meets a series of requirements: the route should avoid densely populated areas, steer clear of major roads, ideally not cross highways, and avoid tunnels and other no-fly zones.
However, attention must also be paid to the energy balance: Too steep ascents should be avoided, as the fuel cell might not provide sufficient energy. Additionally, the path should still run as directly as possible between the starting and destination points. This is a large, multidimensional optimization problem, requiring a suitable software and collaboration with partners to get access to the latest data for this project. The fundamental component for these calculations is a satellite elevation analysis of Austria. This is complemented by settlement and highway data, as well as other restricted areas such as airports. Based on all this information, we can generate optimized routes according to various criteria. The resulting waypoints are then used in Ardupilot to successfully fly AcrossAustria.