ALBATROSS
Solid Recovery Test Rocket for Lamarr

The rocket
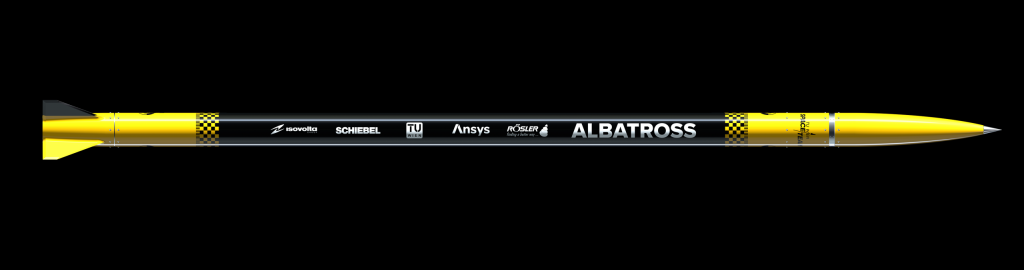
“ALBATROSS” was built as a near-exact replica of the liquid-fueled rocket “HEDY” to make the recovery test as realistic as possible. The airframe has a diameter of 130 mm and an overall length of 3.7 m, including the nose cone and fin can.
The body tube consists of a single carbon fiber section measuring 2.8 m in length. Like “HEDY,” the rocket has a total mass of 17.5 kg. To achieve this weight, two decommissioned propellant tanks were filled with water, integrated into the rocket, and used as ballast.

Recovery
The recovery system of “ALBATROSS” is based on the system used in “HEDY”, but has been improved in several aspects. Both systems operate entirely without pyrotechnics (such as explosive charges or igniters) and instead rely on mechanical release mechanisms. While this makes the system more complex, it also improves reusability and handling safety.
After the rocket reaches its apogee, the flight computer activates a hot wire. This wire cuts a thin cord that holds a clamp band in place. Once the cord is severed, the clamp band releases. At the same time, the rocket’s nose cone, which is preloaded with rubber bands, is pushed away from the airframe.




The separation of the nose cone extracts a small parachute known as the drogue parachute. This parachute stabilizes the rocket during descent and reduces its velocity.
At a predetermined altitude, the flight computer initiates the next stage of the recovery sequence. Two independent retention cords are used to provide redundant deployment capability. Cutting either one of these cords is sufficient to release the main parachute. The main parachute is then pulled out by the drogue parachute, fully inflates, and ensures a safe landing of the rocket.
Since the recovery of “HEDY” did not work entirely as expected, several improvements were incorporated into the recovery system of “ALBATROSS” to increase the reliability and robustness of the overall deployment process.
Aerostructure
By using reusable laminating molds that had already been employed in the Lamarr project, a replica of the aerostructure components was manufactured for this test rocket. The parts, produced from both GFRP (Glass Fiber Reinforced Polymer) and CFRP (Carbon Fiber Reinforced Polymer), will be tested as part of the Albatross rocket to evaluate their structural integrity and reliability, allowing conclusions to be drawn regarding potential optimizations for the Lamarr project.
As with HEDY, the airframe consists of a continuous 2.8 m long CFRP body tube. The fins were also manufactured from CFRP and feature a Rohacell core. The nose cone was deliberately made from GFRP to ensure reliable radio communication with the rocket during flight. Altogether, the structural aerostructure components have a combined weight of approximately 2.9 kg.



Electronics
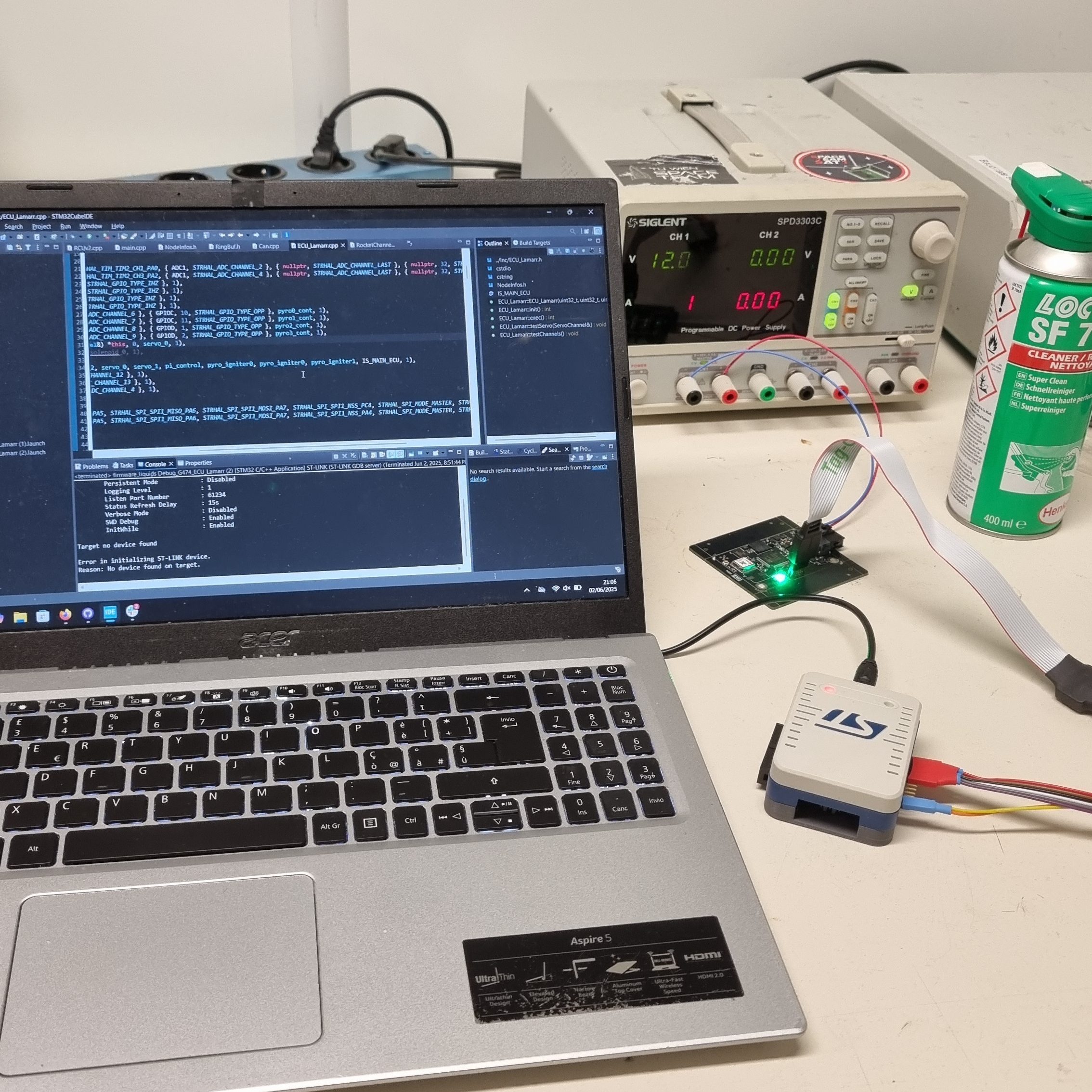
At the upper end of the rocket’s airframe is the electronics stack, which has largely been inherited from HEDY. It houses the battery for our custom flight computer as well as a separate battery dedicated to the two commercial off-the-shelf (COTS) flight computers responsible for parachute deployment.
For flight control and recovery, we use a CATS VEGA and an Altimax G4. These two COTS flight computers operate redundantly, meaning that both are capable of independently deploying both parachutes. If one of the flight computers were to fail, the other would still be able to carry out the complete recovery sequence, significantly increasing system reliability.
Our custom flight computer, the RCU (Radio Communication Unit), serves a different purpose during this flight. Rather than controlling recovery events, it will passively collect flight data and transmit telemetry to the ground station via LoRa. In addition, the RCU automatically powers on the onboard RunCam cameras before launch, ensuring that video footage of the flight is recorded.
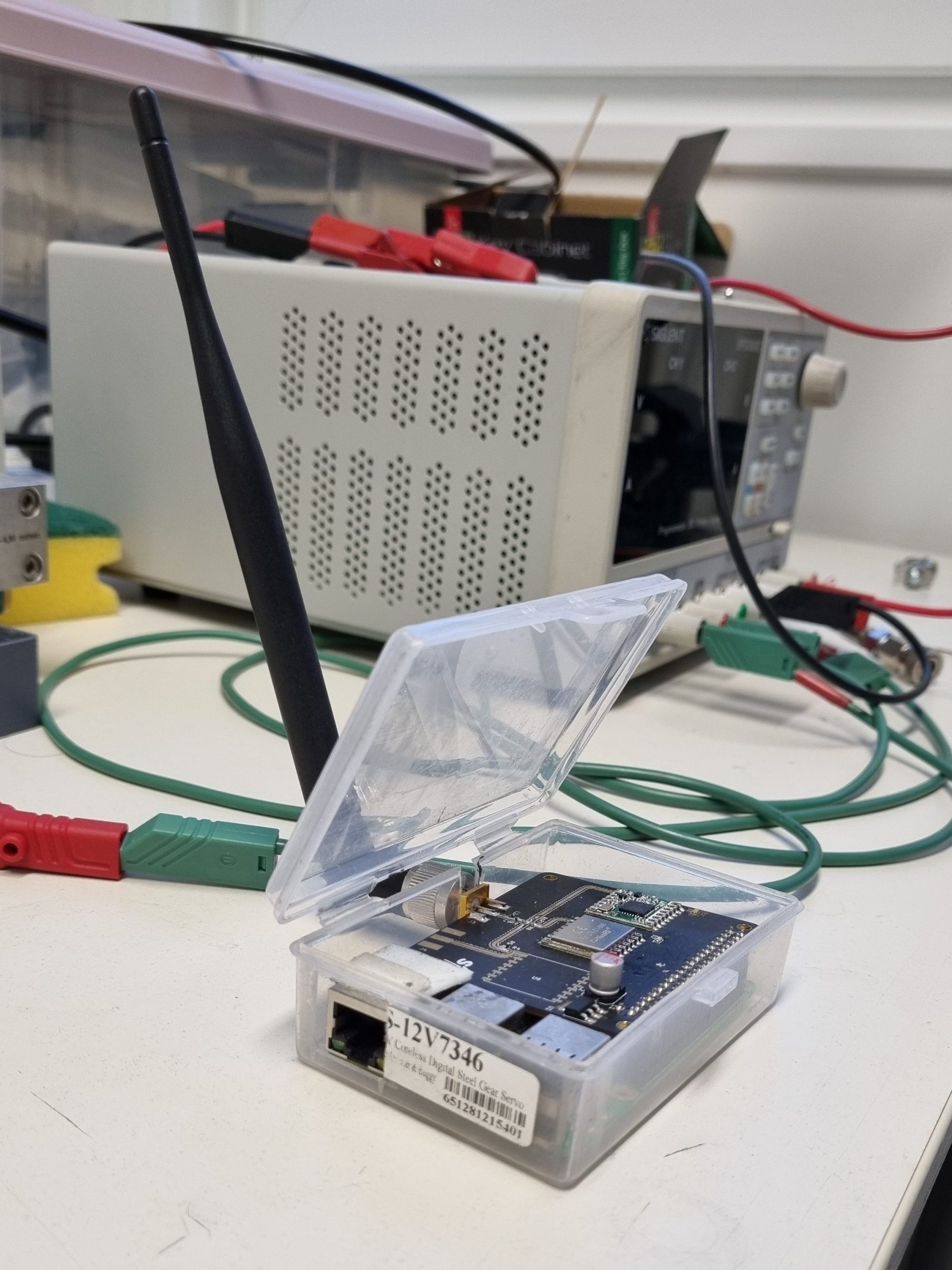
Ground station
To receive live telemetry from the rocket both on the pad and in flight, we use custom-built ground stations. Each station consists of a Raspberry Pi paired with a self-developed LoRa HAT and an attached antenna.
Custom software processes the incoming data packets from the rocket and displays them on a local web interface, allowing nearby devices to easily access and monitor the telemetry in real time.
For the recovery test flight, the rocket will most likely remain within line of sight at all times. However, for flights to significantly higher altitudes using the liquid propulsion system, these ground stations will be essential for tracking the rocket and verifying that it is safe to approach after landing.
FLIGHT


Unfortunately, the flight did not proceed entirely as planned. Right after launch, the rocket tilted more than expected, resulting in a higher horizontal velocity at apogee than anticipated.
At apogee, the recovery sequence initially performed as intended: the clamp band was successfully released, and the rocket separated correctly. However, the drogue parachute was not deployed immediately. We suspect that the rocket’s high horizontal velocity caused air to flow rapidly past the parachute compartment, preventing the drogue parachute from being extracted and keeping it inside the parachute tube.
The drogue parachute only deployed shortly before impact. By that point, the rocket was already too close to the ground for the parachute to effectively slow its descent.
As a result, the airframe impacted the ground at high speed and sustained significant damage. On a positive note, the nose cone, ballast tanks, and payload all survived the flight with little to no damage.
While the outcome was not what we had hoped for, test flights like this are an essential part of the development process. The data collected during the flight will help us better understand the failure mechanism and identify areas for improvement. We will use these insights to further refine and improve our recovery system before building and flying another recovery test vehicle. Only after successfully validating these improvements will we move on to fly the next iteration of HEDY.
Although the flight did not achieve all of its objectives, it provided us with valuable data and a better understanding of our system’s behavior. We will use these insights to refine our recovery system, build a new recovery test vehicle, and validate the improvements before flying the next iteration of HEDY. We remain highly motivated and confident in our ability to overcome these challenges.
