
Current Events – STS-1 is ready for launch!
Our satellite has been successfully integrated into the launch vehicle and is now secured inside the rocket that will carry it into orbit. We are proud to be flying aboard Isar Aerospace’s Spectrum rocket, the launch does not yet have a date, but we are looking forward to it.
An exciting milestone as we prepare to operate STS-1 in orbit.
For the latest updates on the launch: https://isaraerospace.com/mission-2
SpaceTeamSat1 (STS1)
SpaceTeamSat1 (STS1) is the current CubeSat mission of the TU Wien Space Team, which was started in August 2020. The aim is to develop a 1U CubeSat for educational purposes and to operate it in orbit. In addition, a dedicated ground station is operated for communication with the CubeSat. This will give students in Austria the opportunity to run self-developed software on the satellite’s education payload. The payload of the CubeSat “STS1” consists of a Raspberry Pi to which various sensors and cameras are connected. Students from AHS and BHS can then use Python to access these and take measurements, images and videos. Once the code has been successfully validated on the ground, it is transmitted via RF communication to the CubeSat “STS1”, which executes the code and transmits the results of the experiments back to the ground station. From there, the (processed) data is handed over to the students. The data can then be analyzed, interpreted and presented in the final step. Another important aspect is that the student teams get to know the entire process of space data communication. For this purpose, a Mission Control Center will be set up at the TU Wien Space Team HQ, which will then display the current status data, position of the CubeSat, etc. As SatNOGS (https://satnogs.org/) builds the basis for the ground station and is also recommended to the participating schools during the mission, a (reduced) mission control system – without the option of sending data to the CubeSat – can also be set up at the schools. Two diploma theses have already been finished at an HTL (as of October 2025).
As “STS1” is the first CubeSat mission of the TU Wien Space Team to be developed independently, special emphasis is placed on building up know-how regarding the development, operation and legal steps of a satellite mission. In the course of this, reviews, which are also common for larger ESA or NASA space missions, are also part of our daily routine. On the one hand, this increases the probability of a successful mission and, on the other, it ensures proper documentation of the mission, which will also benefit future generations within the TU Wien Space Team when developing future CubeSat missions.
Facts about the CubeSat mission “SpaceTeamSat1”
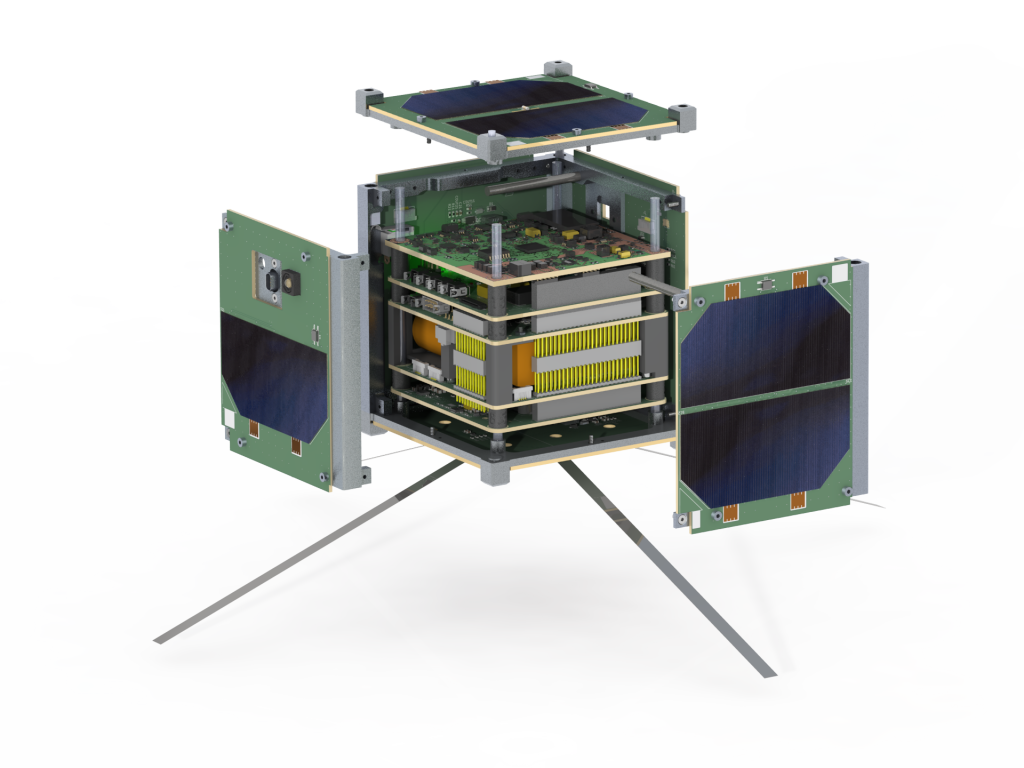
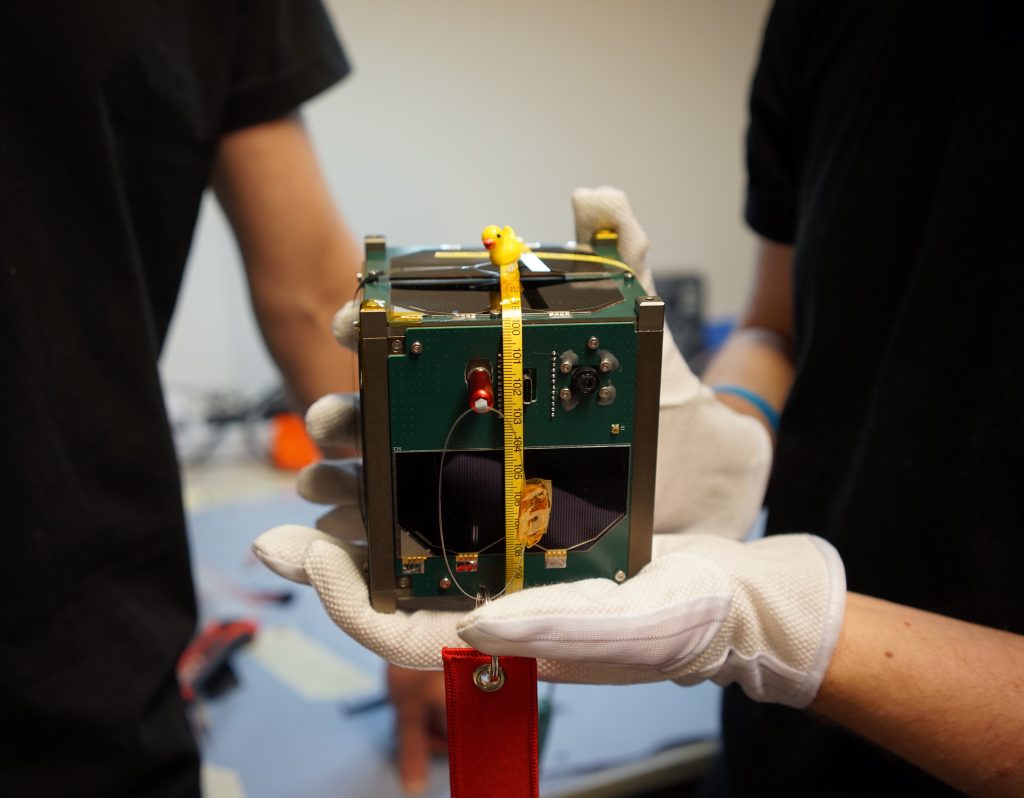
- 1U CubeSat platform (10 x 10 x 12 cm³ and approx. 1.0 kg)
- STS1 will be operated in a Low Earth Orbit (LEO ~ 350 km – 500 km)
- STS1 will be a live laboratory for AHS and BHS students
- STS1 will address the amateur radio community and bring the topic of “amateur radio” into the classroom. Schools will also have the opportunity to operate their own SatNOGS ground station.
- STS1 will be launched by the launch provider Isar Aerospace
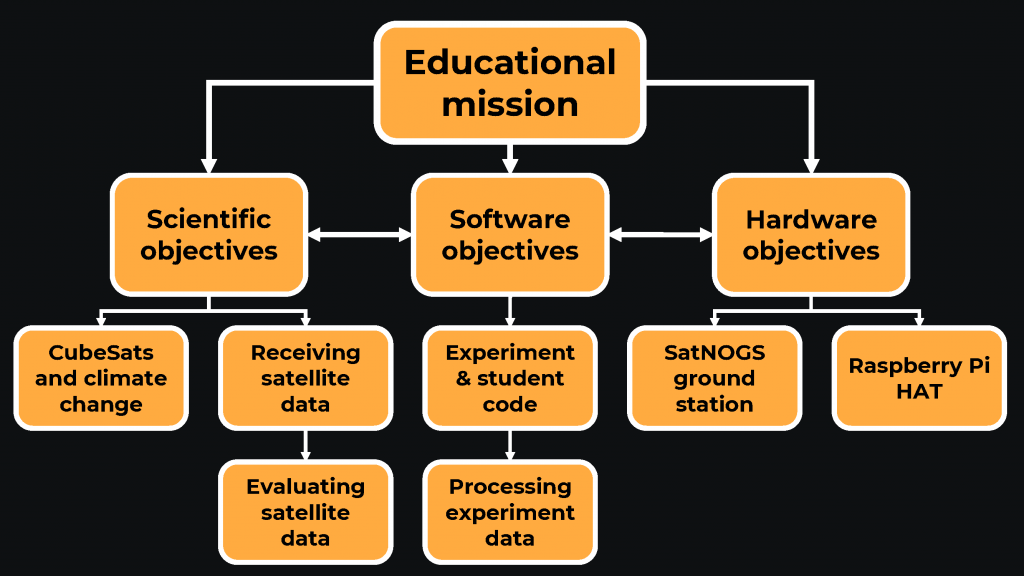
Education Mission Objectives
- Student teams compete in a space software experiment competition
- Python code is executed on the Education Payload based on Raspberry Pi
- Countless software projects are possible. Various sensors and cameras are available for this purpose.
- The measured values and images/videos are made available to the student teams for further processing
- The student teams interpret and present their results and thus learn about important aspects of space technologies
The education payload contains the following sensors
- Temperature sensors at various points in the CubeSat
- Acceleration sensor (accelerometer)
- Gyroscope
- Magnetic field sensor
- UV sensor
- Current and voltage values of the solar cells and batteries
- Dosimeter (Seibersdorf)
- 2 cameras
The kick-off workshop took place in August 2020, in which the mission statement and the objectives of the mission were defined.
Mission statement
Enthusiasm and interest in technology and science are important characteristics of a progressive society. They stem from curiosity and the desire to discover, which are deeply rooted in human nature. Today, space technologies allow humanity to pursue this urge and thus expand its intellectual horizons further than ever before. Although space technologies are deeply rooted in pop culture and organizations such as NASA, ESA or SpaceX successfully conduct high-profile missions, a hands-on approach to these topics seems out of reach for most people. Therefore, we want to give AHS and BHS students an introduction to space technologies by giving them the opportunity to conduct their own software experiments on our self-developed CubeSat platform “Made in Austria”. We hope that this will broaden their educational horizons and inspire the next generation of space and science enthusiasts.
Mission objectives
The mission objectives serve to raise awareness of the benefits of a space mission and have defined goals for a complex space mission.
Primary mission objectives
- To develop and manufacture a functioning CubeSat.
- To ensure the operation of our self-developed CubeSat.
- To give students the opportunity to run their self-developed software on a CubeSat.
- To motivate students to participate in a space project.
SECONDARY MISSION OBJECTIVES
- To take a picture from space.
- To make the collected data and experiences available to the public, and in particular to other CubeSat missions.
EDUCATION MISSION
While some AHS and BHS carry out small satellite projects, such as CanSat (https://ars.electronica.art/esero/de/projects/cansat/), AstroPi (https://astro-pi.org/) or the construction of a ground station, these projects are usually close to the ground and therefore not exposed to real space conditions. With our CubeSat mission, we as the TU Wien Space Team want to expand the possibilities and encourage students to participate in a space mission that takes place in an actual orbit around the Earth by means of various experiments. To make this possible, we are developing a 1U CubeSat platform that allows access to a Raspberry Pi and the sensors and cameras connected to it. Students can therefore write their own software experiments in Python and evaluate and interpret data from sensors in space.
However, we do not only want to implement software projects, but also promote work on hardware topics. Participating schools can obtain prefabricated Raspberry Pi HATs with the actual sensors on the CubeSat, which enables the development of software experiments on earth. However, participating HTLs can also assemble their own printed circuit boards (PCBs) based on the model of our EDU subsystem or develop their own Raspberry Pi HATs. As the CubeSat will be open-source, all production documents will be freely available. In addition, students can build and operate their own SatNOGS ground station as part of the course in order to be able to communicate with the STS1 or other satellites themselves. As these ground stations can also be operated outside of this CubeSat mission, schools can continue to receive data from space in the future.
As we are currently working on the details of the various aspects, you will find more detailed descriptions here in the future.
Participating Schools
If you want to participate (and are a pupil or a teacher), feel free to get in touch with david.wagner@spaceteam.at
- HTL Rankweil
- HTL Leonding
- tgm
- HTL Mödling
- HTL Hollabrunn
- Gymnasium Wasagasse
- Gymnasium Bruck a.d. Leitha
- HTL Salzburg
System Architecture
The individual subsystems of the CubeSat “STS1” are presented below. This section is updated regularly, so you will always find the latest developments here (as of January 2024).
The three most important subsystems of STS1 are the Electrical Power System (EPS), the Communication Module and On-board Computer (COBC) and the Education Module (EDU). The EPS is responsible for power generation and distribution. The COBC is the main processing and scheduling unit of the CubeSat and is also responsible for RF communication. The EDU executes the software experiments provided by the individual student teams. For this purpose, this module is equipped with a Raspberry Pi and several sensors, including two cameras.
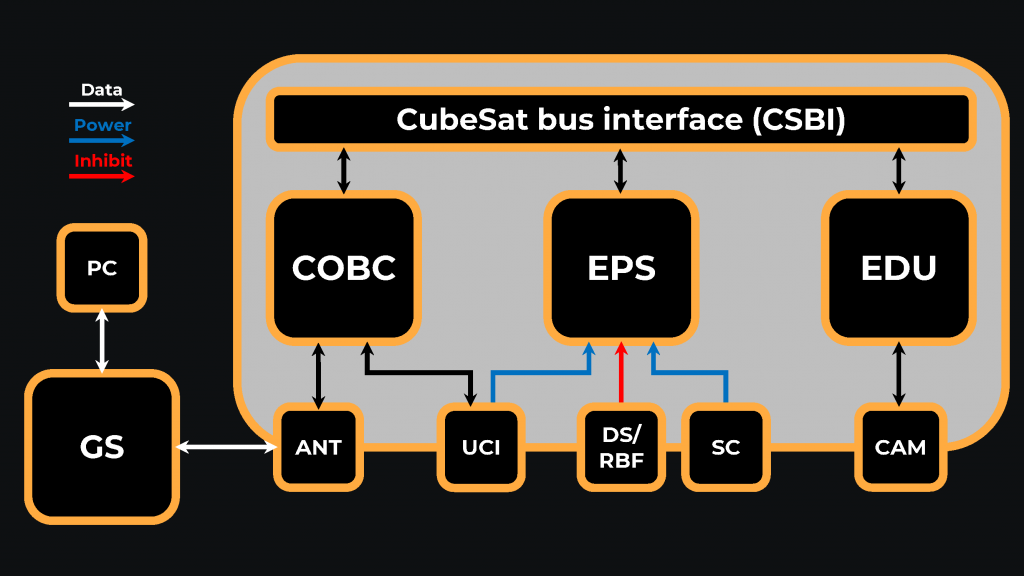
The figure above shows the basic system architecture of the CubeSat and the associated ground infrastructure. The antenna system (ANT) is used to communicate with the COBC, which contains the RF module for receiving and transmitting data. The solar cells (SC) are directly connected to the EPS and are used to generate and provide electrical energy. The SatNOGS ground station (GS) is used for communication (sending commands to the CubeSat and receiving data from the CubeSat). The Umbilical Cord Interface (UCI) allows us to reprogram the COBC and charge the batteries after assembling the CubeSat. The Deployment Switches (DS) and the Remove-Before-Flight pin (RBF) ensure that the CubeSat is not supplied with power in the safely stored configuration (in the chassis of the launch vehicle). Within the EDU subsystem, the cameras (CAM) can receive image acquisition commands. This CubeSat uses a passive detumbling system, which reduces rotation by means of two hysteresis rods in the X and Y axes. In addition, a permanent magnet is installed in the Z-axis, which aligns this axis of the satellite with the help of the earth’s magnetic field.
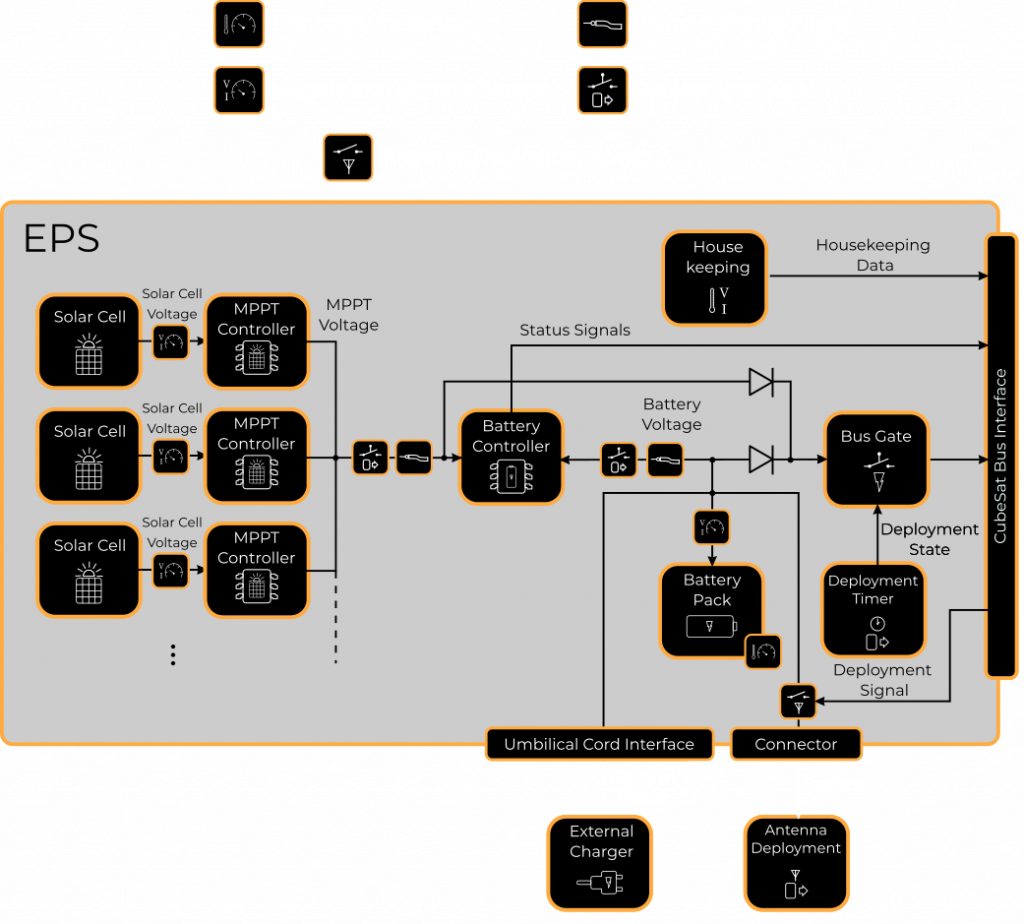
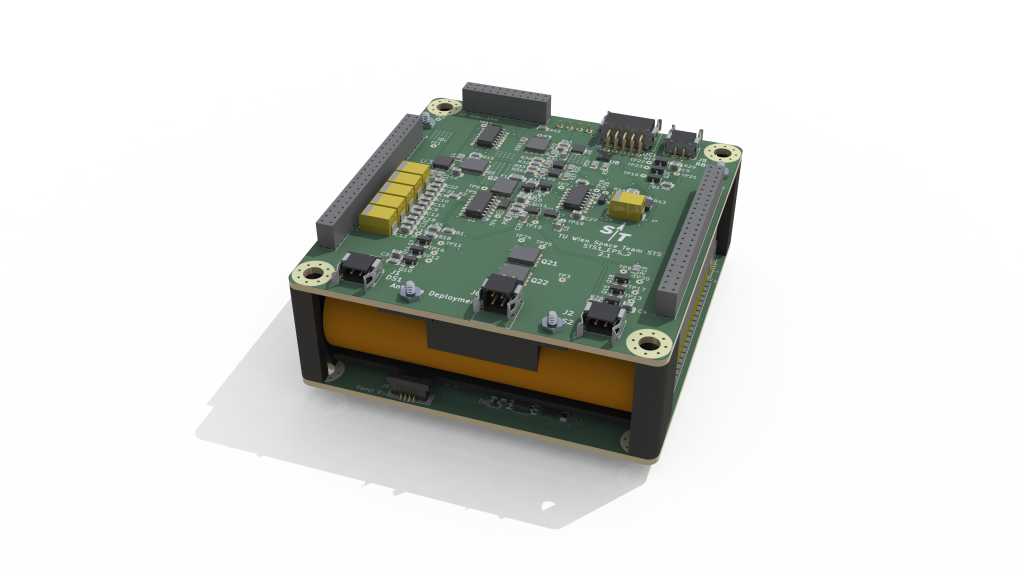
ELECTRICAL POWER SYSTEM – EPS
The Electrical Power System (EPS) is responsible for the continuous generation and supply of electrical energy on a single, unregulated voltage level (voltage bus). Energy is generated exclusively via the solar cells attached to the outer surfaces of the CubeSat. Surplus energy is stored in batteries to ensure that the satellite can continue to be supplied with power even in sections of the orbit where there is no light. The EPS also contains safety functions at system level, such as the Remove-Before-Flight pin (RBF), the Deployment Switches (DS) and a Deployment Timer (DT). All these functions are designed to prevent premature activation of the CubeSat while it is still inside the launcher. Housekeeping data such as battery voltage, current and temperature are collected by the EPS and made available to the COBC via a housekeeping interface. In addition, the release mechanism of the antennas is implemented on the EPS, which ensures that the antennas of the CubeSat fold out as soon as sufficient electrical energy is available.
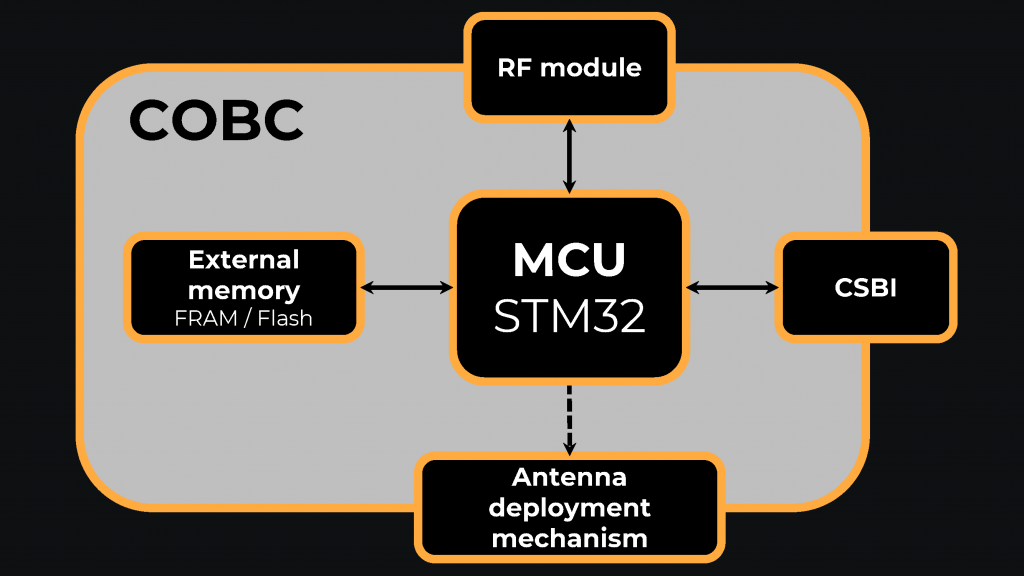
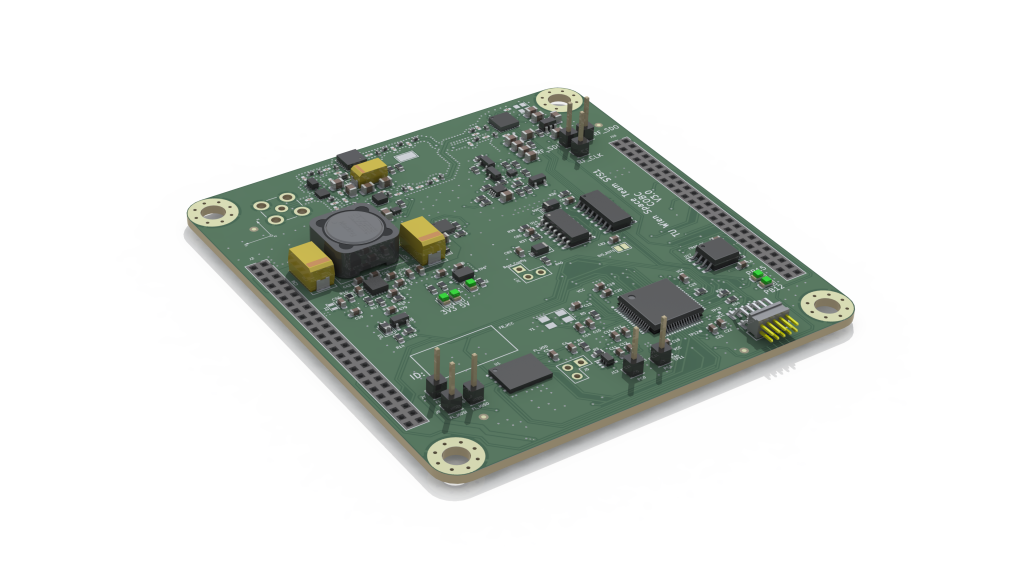
COMMUNICATION AND ON-BOARD COMPUTER – COBC
The Communication and On-board Computer (COBC) of the CubeSat STS1 combines two classic CubeSat subsystems: The communication module (COM) and the on-board computer (OBC). The COM is responsible for receiving and transmitting data and the OBC plans and organizes all CubeSat activities. In this way, the OBC acts as the master of the CubeSat platform by managing memory access and also operating and managing the Education Unit (EDU). The Microcontroller Unit is the heart of the (C)OBC and controls the entire data flow and commands on board the CubeSat. We use an STM32F411RE (STM32 for short) for this purpose, on which Rodos is used as the operating system. The STM32 in combination with Rodos analyzes incoming and outgoing data that is routed to and from the radio module. The STM32 also manages all data accesses – reading, writing and deleting – to the external flash and FRAM memory and is responsible for data exchange with the EDU. The flash has limited write cycles, but a relatively large storage capacity. A file system specially designed for flash memory is therefore set up on it to temporarily store the student programs and their results. Complementary to this, the FRAM can be written to as often as required, but with a lower storage capacity. It is therefore predestined for storing small amounts of data that change frequently, such as the Housekeeping data, which contains the current status of the CubeSat. The radio module consists of a SiLabs chip and an output stage. For communication, we use the Silabs Si4463 IC in combination with an LNA for high receiver sensitivity and a 2 W power amplifier for the downlink. We use (G)FSK with bit rates between 2400 and 115200 baud, whereby the actual maximum depends on the real conditions. The protocol stack is based on the CCSDS telemetry/telecommand protocol stack with a robust channel coding and forward error correction scheme.
All of the COBC’s electronics are supplied by a DC/DC converter, which provides the voltage from the EPS. This implementation is necessary as two different voltage ranges (3.3 V and 5 V) are required to operate the COBC. It must also be ensured that the components are supplied with as constant a voltage as possible.
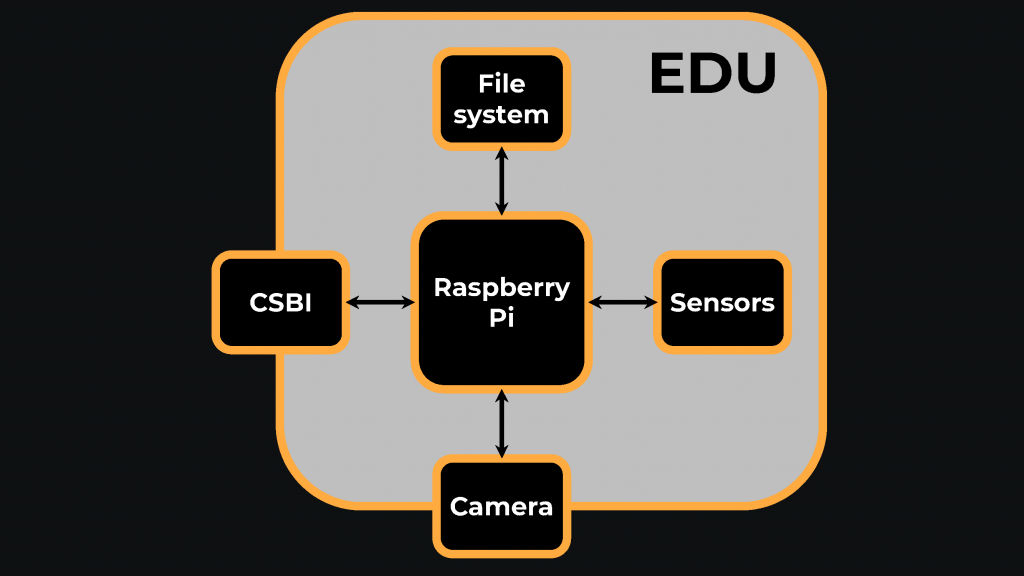
EDUCATION MODULE – EDU
The Education Module (EDU) is the platform on which students will carry out their software experiments. It consists of a Raspberry Pi that has access to various sensors, including two cameras. The generated (and processed) data can be downloaded via a command. After a successful download, the data is processed and handed over to the student teams for analysis.
The EDU module uses the popular Raspberry Pi platform. This should lower the barrier to entry for both teachers and students, as many resources for the platform are freely available on the internet and many young people are already familiar with the platform. In addition, we will try to keep programming as accessible as possible by providing software libraries for the most common operations (e.g. reading sensors, data processing, etc.) on the EDU module. In order to program and test the software experiments on the ground, we offer the possibility to obtain EDU HATs for the Raspberry Pi or to assemble and develop them yourself.
The following sensors can be found on the EDU: temperature sensors, magnetic field sensor, acceleration sensor, gyroscope, GNSS receiver, cameras, UV sensors and a dosimeter. It is also possible to read out the current and voltage values of the EPS – i.e. the solar cells and batteries. Possible experiments with these sensors include determining solar activity over several hours or detecting clouds over the Atlantic. Students participating in the STS1 educational mission will gain hands-on experience writing actual space software, which will enhance their problem-solving and teamwork skills. The entire mission will be held in the form of a competition, where we hope to have the support of Austrian space companies and space celebrities to honor the winning teams. Further details are currently being worked out and will be added here on an ongoing basis.
GROUND STATION AND SATNOGS
Our primary ground station (GS) is based on the rotatable GS design of the SatNOGS project. We are currently working on extending the existing SatNOGS receiver setup to enable bidirectional communication with our CubeSat
The SatNOGS project enables us to build on a well thought-out software basis and to significantly expand our downlink capacity with the help of the large network of ground stations.
SatNOGS also allows us to integrate the topic of space communication into our educational mission objective, as students can build their own ground station with which they can receive data from our CubeSat and many other objects in Earth orbit (from other CubeSats to the ISS).
There are easy-to-build designs to help students understand the topic, which can later be extended to fully rotatable ground stations with directional antennas.

Members
- David Wagner – Project lead, System architecture
- David Freismuth – Technical project lead, EPS lead, System architecture
- Andriy Smolyanyuk – COBC hardware lead
- Florian Guggi – EDU software lead
- Florian Donauer – COBC software lead
- Stefan Galavics – EDU hardware lead
- Simon Köfinger – EDU
- Stefan Lie-Ungurean – EPS, SidePanels lead
- Thomas Ranner – GS lead
- Jakob Riepler – COBC, RF communication
- Philipp Uhl – GSE
- Richard Dumser – GSE
- Gernot Kunz – GS database
- Alan Antoine F4LAU – RF communication
former members
- Alexander Hartl – EPS
- Benjamin Geislinger – Mechanics
- Billal Teiba – EDU software
- Christoph Müllner – Mechanics
- Chrysostomos Siegl – FlatSat, EPS
- Daniel Schloms – COBC software
- Elena Jochum – COBC software
- Fabian Kresse – Software
- Florian Rohrer – EDU software
- Gera Kozhakhmetova – PR, Social Media
- Jan Pac – EDU, Software
- Jerome Hue – COBC software
- Jithin Njondimackal – COBC software
- Karim Ali – Integration Support
- Kamil Chmela – COBC software
- Leon Janisch – EPS
- Lili Weinmann-Eiching – EPS
- Luka Menzel – COBC software
- Marianne Röchling – COBC software
- Marina Ivankovic – EDU
- Markus Roth – COBC software
- Mihai Bojor – COBC software
- Nils Mosser – GSE
- Nivin Thottathi – GS software
- Noel Atzwanger – Software
- Patrick Kappl – System architecture, COBC software lead
- Paul Schmitt – PR, Software
- Peter Kremsner – COBC, RF communication
- Raphael Behrle – Educational mission (Former: Project lead, System architecture)
- Simon Klaus – COBC
- Thomas Hirschbüchler – System architecture
- Tim Munhowen – Mechanics lead
- Tomoya Hagen – COBC software
- Zsófia Kálosi – GS Software