The Hound

Kurzfassung
The Hound, eine zweistufige Rakete mit kommerziellen Motoren, die den europäischen Höhenrekord unter Studierenden brechen will, und dabei vielleicht sogar das Weltall erreichen kann.
- Unterstufe: Cesaroni Pro 98 N5800
- Oberstufe: Cesaroni Pro 75 M2245
- Max. Höhe: >100km (Oberstufe)
- Max. Geschwindigkeit: >Mach 5 (Oberstufe)
Das Projekt
Das Ziel von The Hound ist es, eine zweistufige Rakete mit kommerziell verfügbaren Motoren zu bauen, welche auf maximale Flughöhe optimiert ist. Dabei sollte ein neuer Höhenrekord für “von europäischen Studierendenteams gebaute Experimentalraketen” aufgestellt, und unter Optimalbedingungen sogar die Kármán-Linie, die Grenze zum Weltraum in 100 km Höhe, durchbrochen werden.
Die ausgewählten Motoren haben einen Gesamtimpuls von ca. 30000 Ns. Zum Vergleich: Mit diesem Impuls könnte man ein Motorrad auf 400 km/h beschleunigen. Weil jedoch unsere Rakete wesentlich leichter ist, beschleunigt diese auf 5500 km/h. Bei dieser Geschwindigkeit würde man die Länge eines Marathons in unter 30 Sekunden zurücklegen. Unsere Simulationen legen nahe, dass – in Abhängigkeit von den tatsächlichen aerodynamischen Parametern – eine Höhe von mehr als 100 km über dem Boden erreicht werden kann.
Diese Zahlen stellen in mehrfacher Hinsicht eine Herausforderung dar. Einerseits muss die Rakete so leicht und klein wie möglich gebaut werden, um diese Geschwindigkeit und Höhe überhaupt erreichen zu können. Andererseits erhöhen diese Werte den Bedarf an Festigkeit und Hitzebeständigkeit, die spezielle Materialien und Fertigungstechniken erfordern. Alles in allem ist dies ein schwieriges Optimierungsproblem mit mehreren Variablen.
Weitere Herausforderungen sind:
- Zündung des Motors der Oberstufe bei verringertem Umgebungsdruck
- Bestimmung der erreichten Höhe
- Apogäumsdetektion und barometrische Höhenerkennung zum Auslösen der Bergung der ersten und zweiten Bergungsstufe (2-stufiges Bergungskonzept)
- On-Board-Videoaufnahmen
- Aufrechterhalten des Funkkontakts zur Bodenstation während des ganzen Fluges
- Übermitteln von Sensordaten und, vor allem, der Landekoordinaten
Die größte Herausforderung für uns, als europäisches Team, besteht jedoch darin, einen Startplatz mit einer geeigneten Höhenfreigabe und passendem Sicherheitsradius zu finden. Bisher gibt es für uns zwei gangbare Optionen:
- Ein Start in der Black Rock Wüste, Nevada, USA im Rahmen des Events “BALLS” der amerikanischen Tripoli Rocketry Association.
- Ein Start in der Mojave Wüste, Kalifornien, USA, am Gelände der Friends of Amateur Rocketry.
Kernkomponenten
- Avionik-System: Inertialmessung; GPS-Daten; Startdetektion, Zündung der Stufentrennung, des Oberstufenmotors und des Bergungssystems; Telemetrie
- Zentrale Bodenstation:stellt die Verbindung zur Rakete her; visualisiert alle flugrelevanten Parameter der Rakete in einer grafischen Oberfläche in Echtzeit
- Autonome Bodenstationen: mehrere über das Gebiet verteilte RF-Repeater erweitern den Empfangsbereich der zentralen Bodenstation; speichern zusätzlich die empfangenen Datenpakete lokal unabhängig von der zentralen Bodenstation
- Mechanische Struktur: Spitze aus hochtemperaturbeständigem Glasfaserverbundwerkstoff; Motorrohre sind tragende Teile der mechanischen Struktur
- Stufenkupplung: im Design des Hecks der Oberstufe integriert: leicht, steif und kompakt
- Bergungssystem: zweistufiges Design mit hitzefestem Aramid-Vorschirm sowie einem Nylon-Hauptschirm
- Aerodynamisches Leitwerk: leichtes Design aus Metall, welches per Direct-Metal-Laser-Sintering (DLMS) hergestellt wird; sorgt für eine ausreichende Wärmeableitung, um eine hohe Festigkeit bei höheren Geschwindigkeiten zu erreichen; eine hybride Isogrid-Holm-Struktur im Innenraum sorgt für ein hervorragendes Festigkeits-Gewichts-Verhältnis
Die Präsentation des Projekts durch den Projektleiter Christoph Fröhlich im Rahmen des Space Events 2019:
Chronologie und Meilensteine
Erste Starts
- Im August 2016 nahm das Space Team an einem Raketenflugtag in Manching, Deutschland, teil, wo der erste zweistufige Testflug des Space Teams stattfand. Es wurde absichtlich ein Motor mit geringem Schub gewählt, um den Ablauf des zweistufigen Fluges vom Boden aus beobachten zu können. Dieser Flug demonstrierte erfolgreich den geplanten Flugablauf.



- Nicht lange danach fand der erste Überschallflug des Teams statt. Mit einer maximalen Beschleunigung des 30-fachen der Erdbeschleunigung wurde die Rakete innerhalb von 1,4 s auf 390 m/s (Mach 1,14) beschleunigt. Trotz der aerodynamischen Störeffekte beim Passieren des transsonischen Bereichs, funktionierte die Gipfelpunkt-Erkennung der Bordcomputer reibungslos.
- Nach langer Entwicklungszeit nahm “The Hound” endlich seine endgültige Form an. Im Mai 2017 absolvierte die Oberstufe von “The Hound” in Roitzschjora (Deutschland) ihren Jungfernflug. Das Ziel dieses Tests bestand darin, das neue Bergungssystem, die automatische Gipfelpunkt-Erkennung, die Lageschätzung und die Funkmodule zu testen. Dies sollte in einer Konfigurationen stattfinden die nahezu identisch jener ist, welche für den europäischen Rekordversuch verwendet werden soll.
- Anfang 2018 wurden die letzten Tests in Roitzschjora (Deutschland) durchgeführt, und The Hound in einer zweistufigen Konfiguration erfolgreich gestartet bevor die Rakete in die USA verschifft wurde.
Starts in voller Motor-Konfiguration
- Der erste Versuch den Rekord zu brechen wurde 2018 in Nevada (USA) unternommen. Aufgrund eines Fehlers im Avioniksystem wurde die Oberstufe jedoch nicht gezündet und somit lediglich eine Höhe von ca. 13 km erreicht.
Da der Startversuch im Herbst 2018 nicht erfolgreich verlief, beschloss das TU Wien Space Team das Projekt zu verlängern und 2019 einen neuen Versuch zu starten: “The Hound 2”, welches das Konzept basierend auf den Erfahrungen des letzten Starts in mehreren Punkten adaptiert:
- Verbesserte Integration des Telemetriesystems inklusive neuem Antennendesign
- Iridium-Satellitenkommunikationsmodul als redundante Funkstrecke
- Neues Konzept zur Zündung der Oberstufe
- Neue Onboard-Videokameras
Im September 2019 wurde ein erneuter Rekordversuch unternommen. The Hound 2 startete trotz mehreren Verzögerungen, der Flug dauerte jedoch nicht lange: Die Oberstufe zerbrach kurz nach Brennschluss. Leider desintegrierte auch die Avionikeinheit dabei und die Datenaufzeichnung wurde gestoppt. Auch alle vier On-Board-Kameras konnten nicht mehr gefunden werden. Darüber hinaus brach die Funkverbindung zur Unterstufe während des Fluges ab und diese konnte nicht mehr geborgen werden.
Im Laufe des Jahres 2020 wurde an einem erneuten Update gearbeitet: “The Hound 3”. Die wichtigsten Änderungen sind:
- Integration einer Avionikeinheit im Kuppler zwischen den beiden Stufen, auf der eine Kamera, ein eigenständiger GPS-Tracker und ein GPS-unabhängiges Verfolgungsgerät („Vogelfinder“) sitzen.
- Neues Backup-Device in der Unterstufe
- Die Spitze der Oberstufe wird aus Titan gefertigt, statt wie bisher aus Aluminium.
- Die elektrische Verbindung der Headend-Ignition wird robuster gestaltet. Vor dem Start von The Hound 2 kam es zu einem Kabelbruch an dieser Stelle, der in kürzester Zeit auf der Startrampe repariert werden musste.
- Änderung in der Startprozedur um unabhängiger von der Qualität der Funkverbindung in Bodennähe zu sein.
- Mehr Tests und Testflüge sollen die Plattform “The Hound” zuverlässiger machen, etwaige Tücken beseitigen und dem Team die Möglichkeit geben, die Startprozedur weiter zu perfektionieren.
Im Herbst 2020 sollte ein neuerlicher Versuch unternommen werden um den Europarekord zu brechen. Leider hatte uns das Coronavirus einen Strich durch die Rechnung gemacht: Balls 2020 wurde – wie so viele andere Events auch – abgesagt. Wir hatten aber trotzdem alle geplanten Updates und Verbesserungen umsetzen können. Dank Portugal Space erhielten wir auch eine großartige Möglichkeit diese auf europäischem Boden zu testen: EuRoC 2020. Nach dem Start erreichte der Sustainer eine max. Flughöhe von ca. 9 km was zu dem Zeitpunkt den höchsten Flug unseres Teams in Europa markierte. Die überarbeitete und teilweise neue Elektronik funktionierte einwandfrei und bescherte uns zum ersten mal fünf Onboard-Videos (2x Booster, 2x Sustainer, 1x Interstage).
Auch 2021 wurde uns ein erneuter Rekordversuch in den USA aufgrund von Reisebeschränkungen verwehrt. Wir nutzten die Zeit für Testflüge in Europa, da es trotz des erfolgreichen Fluges in Portugal 2020 noch immer Details zu verbessern gab. Im Juni und November 2021 wurden erfolgreiche zweistufige Testflüge in Polen durchgeführt, und der teaminterne Höhenrekord auf europäischem Boden auf 11800 m gehoben.
Nach dem Motto „alle guten Dinge sind drei“ war das Hound-Team guter Dinge, dass der dritte Rekordversuch von The Hound im Jahr 2022 ein voller Erfolg sein wird. Es wurden zwei Raketen, “The Hound Minor” und “The Hound Major”, erfolgreich gestartet. Bei beiden Flügen wurde die Oberstufe erfolgreich gezündet, doch wurden diese mit ähnlichem Fehlerbild instabil kurz vor Erreichen der Maximalgeschwindigkeit. Somit wurde lediglich eine Höhe von 21,4 km erreicht, was trotz alledem einen neuen teaminternen Rekord darstellt. Somit war auch diese Launch-Kampagne ein großer Erfolg für das Team.
Für einen weiteren Versuch im Jahr 2023 wurden erneut zwei Raketen gebaut: The Hound Minor und The Hound Major. Dieses Mal wurde das Recovery System und die Finnen optimiert, um diesmal stabil genug zu fliegt. Beide Raketen hatten zwar einen erfolgreichen Start, allerdings verliefen die Flüge nicht wie geplant und keine der beiden Raketen konnte die errechnete Flughöhe erreichen. Die Bergung verlief problemlos und alle Teile konnten wiedergefunden werden.
Vorerst ist kein weiterer Start für 2024 geplant und das Projekt ist auf unbestimmte Zeit pausiert.
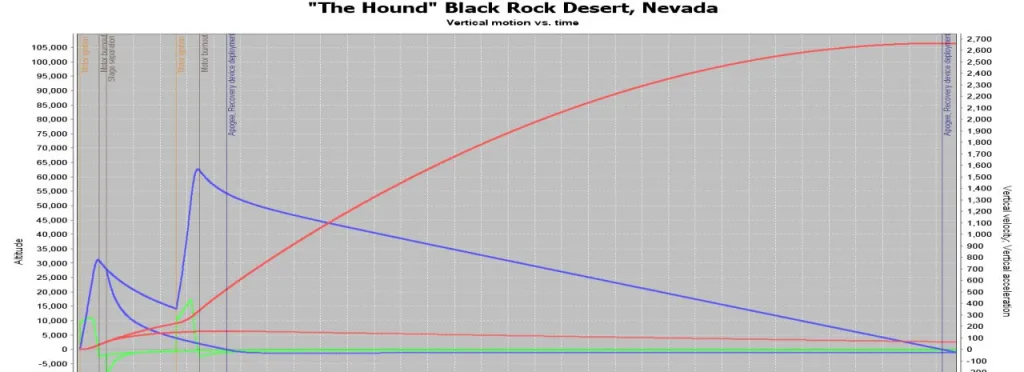
Simulationsergebnisse
Zur Simulation des Fluges wurden die bewährten Programme OpenRocket und RASAero verwendet. Die Ergebnisse, basierend auf den Parametern von “The Hound 2” bei einem Start in der Black Rock Desert, wollen wir hier präsentieren:




