The Hound

Summary
The Hound, a two-stage rocket with commercial engines that aims to break the European altitude record under students, and perhaps even reach outer space.
- first stage: Cesaroni Pro 98 N5800
- second stage: Cesaroni Pro 75 M2245
- flight ceiling : >100km (second stage)
- top speed: >Mach 5 (second stage)
the Project
The aim of The Hound is to build a two-stage rocket with commercially available engines that is optimised for maximum altitude. The aim was to set a new altitude record for “experimental rockets built by European student teams” and, under optimal conditions, even break the Kármán line, the boundary to space at an altitude of 100 kilometres.
The selected motors have a net impulse of about 30 kNs. For reference: With this impulse you could accelerate a motorcycle to 400 km/h. But because our rocket is significantly lighter, it accelerates to 5500 km/h. At that speed one could cover the distance of a marathon in 30 s. Our simulations suggest that a height of more than 100 km can be reached, depending on real-life aerodynamic parameters.
These numbers constitutes a big challenge in many ways. On the one hand the rocket must be as small and light as possible to even reach such speeds and heights. On the other hand these values dictate both higher strength and heat resistance for the rocket, which necessitate special materials and production techniques. All in all, we face a difficult, multi dimensional optimisation problem.
Further challenges include, but are not limited to:
- Ignition of the second stage motor at a lower ambient pressure
- measuring the attained height
- apogee detection and barometric altimetry to trigger both recovery stages (two staged recovery concept)
- on-board video recording
- maintaining radio contact with the ground station throughout the whole flight
- transmission of sensor data, especially the touchdown coordinates
As a European team our biggest challenge remains, to find a launch facility with a permission to fly that high and a suitable safety radius. As of now we have two possible options:
- a start in the Black Rock desert, Nevada, USA at “BALLS” of the American Tripoli Rocketry Association.
- a start in the Mojave desert, California, USA, at a Friends of Amateur Rocketry facility
core competencies
- avionics: inertial measurements; GPS-data; launch detection, ignition of the stage separator, second stage motor and recovery system, telemetry
- central ground station: establishes link to the rocket, visualizes all flight relevant parameters of the rocket in real time in a GUI
- autonomous ground stations: multiple decentralized RF-repeater increase the central ground stations reach, additionally they save received packets locally – independently from the central ground station.
- mechanical structure: nose cone made from highly heat-resistant glass fibre, the motor pipes are integral parts of the mechanical structure.
- stage separator: integrated into the design of the second stage’s rear, light, stiff and compact
- recovery system: two staged system with a heat resistant aramid fibre, drogue chute and a nylon main parachute
- aerodynamic fins: light metal structure, made by direct metal laser sintering (DLMS), enables a sufficient heat flow to guarantee structural integrity at high speeds, a hybrid isogrid Holm structure within enables a great stability-weight ratio
Project presentation by project leader Christoph Fröhlich at the space event 2019:
History and milestones
First Starts
- In august of 2016 the space team took part in a flight event in Manching, Germany where we tested our first two-staged rocket. A weaker motor was chosen on purpose to have better visibility of the flight from the ground. That day was a full success.



- Not long after that, our first supersonic flight took place. With a max. acceleration of 30 times the earth’s, the rocket got to a speed of 390 m/s (Mach 1,14) in 1.4 s. Despite the aerodynamic disturbances at max q the apogee detection worked flawlessly.
- After a long development period “The Hound” finally took on its definitive form. In may of 2017 its upper stage was tested for the first time in Roitzschjora, Germany. The goal of that flight was to test the recovery system, the radio transmitter, automatic apogee detection and navigation system. It happened in a configuration that is almost identical to the one which ought to be used for the European world record attempt.
- In early 2018 the last tests were conducted in Roitzschjora, Germany before “The Hound” was shipped to the USA.
Starts with full Motor configuration
- The first record attempt was made in 2018 in Nevada, USA. Due to a an avionics error the upper stage did not ignite and the rocket only flew to a height of 13 km.
Because the first attempt in the autumn of 2018 did not succeed TU Wien Space Team decided to prolong the project and go for another attempt in 2019. “The Hound 2” adapts the concept based on our learnings of the last launch attempt:
- enhanced integration of the telemetry including a new antenna design
- redundant transmission with an iridium satellite communication module
- new ignition concept for the upper stage
- new on-board video cameras
In september of 2019 a new record attempt took place. “The Hound 2” launched despite many delays, but the flight did not last long: The upper stage burst shortly after engine cutoff. Unfortunately the avionics system disintegrated stopping the data recording in the process. The four on board cameras could not be found again, just like the lower stage which ceased to transmit.
Over the course of the year 2020 we worked on another update: “The Hound 3” The most important changes were:
- Integration of an avionics unit inside the coupler between the two stages which contains a camera, an autonomous GPS tracker and a GPS independent tracker (“bird finder”).
- A new backup device inside the booster
- The top will be built from titan, instead of aluminum.
- The electric connection of the headend ignition will be built more robustly as just before the start of “The Hound” a cable broke and had to be fixed in a short amount of time right at the launch pad.
- A change in the starting procedure in order to be more independent from the quality of the radio communication near ground.
- More tests and test flights are supposed to make the platform “The Hound” more reliable, get rid of possible difficulties and give the team the possibility to further bring the starting procedure to perfection.
In autumn 2020 another attempt was planned. Unfortunately, the event Balls — like many other events — got canceled due to the global COVID-19 pandemic. However, we were still able to implement all updates and improvements, which were planned for The Hound 3. Thanks to Portugal Space we even got a great opportunity to test all that on European soil: EuRoC 2020. With the sustainer reaching a max. altitude of about 9km the launch in Portugal marked our team’s highest rocket flight in Europe to that time and was a great success overall. The new and updated avionics worked flawlessly and, for the first time, we were able to watch five on-board videos after the launch (2x booster, 2x sustainer, 1x interstage). Despite all those achievements there is still work to be done since the main parachute of both stages did not deploy.
Again, in 2021 we did not have the chance for another record attempt due to active travel restrictions. But we used the time for test flights in Europe, because despite the successful flight in Portugal 2020 there was still room for improvements. Two successful two-stage test flights were performed in Poland in June and November 2021, increasing the team-internal altitude record on European soil to 11,800m.
True to the motto “the third time’s the charm”, the team was optimistic that the third attempt performed in 2022 will be a great success. Two rockets were launched successfully, “The Hound Minor” and “The Hound Major”. But both upper stages experienced an aerodynamic instability close to their maximum velocity after upper stage ignition, and reached a maximum altitude of 21.4 km only. But these launch campaign was still a great success for the team, read more about the results in this report.
Two more rockets were built for another test in 2023: The Hound Minor and The Hound Major. This time, the recovery system and the fins were optimised to be stable enough to fly this time. Both rockets had a successful launch, but the flights did not go as planned and neither rocket was able to reach the calculated altitude. The recovery went smoothly and all parts were recovered.
For the time being, no further launches are planned for 2024 and the project has been paused indefinitely.
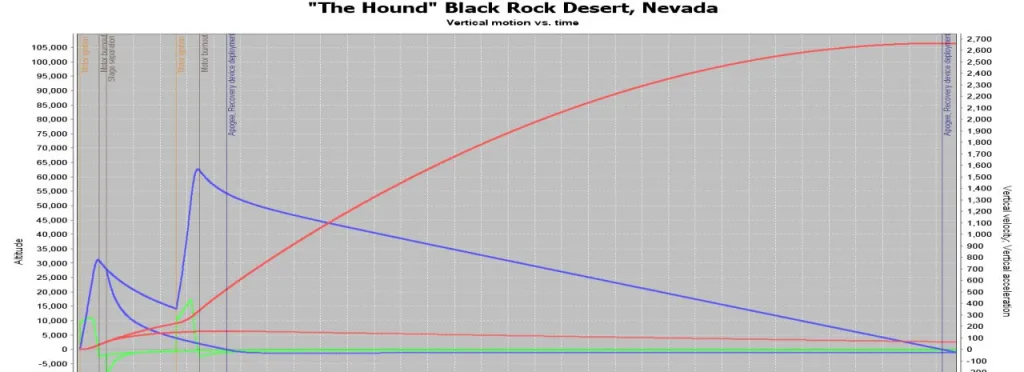
results of simulations
To simulate the flight the tried and tested programmes OpenRocket and RASAero were used. We present the results based on the parameters of “The Hound 2” at a launch in the black rock desert:




