We have some good news regarding the development process of our CubeSat project “SpaceTeamSat1”. As posted in our last blog entry (Link: SpaceTeamSat1 Update), we started with the hardware development of the crucial subsystems. Moreover, our mechanical design is in production at moment. Hence, we expect to present the aluminium structure by the end of summer 2021. This major step is crucial to detect any design issues and to verify our PCB dimensions as well as evaluating any electromagnetic interference between the subsystems. Consequently, we are designing our first prototype PCBs of the communication and on-board computer (COBC) and electrical power system (EPS). In autumn we will have them physically on-hands for further development and first implementations of our RODOS-based software.[1] Finally, by the end of the year the FlatSat shall be ready to be tested thoroughly.
Besides the actual development of the CubeSat we made progress on our ground station respectively on the ground segment architecture. Further enhancing the educational objective of this mission we decided to participate in the SatNOGS open-hardware project.[2] Here, it needs to be distinguished between software features of SatNOGS we are using in our COSMOS platform[3] and the actual SatNOGS ground station. Regarding COSMOS, we can also announce some good news: In the last month we were able to run COSMOS and receive as well as send dummy commands, which is a crucial step towards our ground station software.
SatNOGS is a worldwide network of groundstations, which is tracking and receiving downlinked data from various CubeSats. Thus, allowing to receive beacons and data all the time. These data can then be accessed over the SatNOGS server for further processing. Utilizing this infrastructure allows us to analyze the status of our CubeSat all the time, enhancing the capabilities of communication significantly. Most notably, as the whole SatNOGS project is an open-hardware project, creating your own SatNOGS ground station is well documented and described in detail. This also allows students to build their own ground station at their schools and allows them to further enhance their CubeSat skills. Moreover, with an approximate cost of €500, a fairly cheap ground station can be assembled. So far, we already started with the electronics for the rotor structure, which is necessary to track and follow the CubeSat. This also includes power electronics for driving and controlling the used step-motors. Our mechanical engineers started to work on the housing, which needs to be water-proof as the ground station obviously needs to be placed outside. Additionally, the work on our helix antenna started as well.
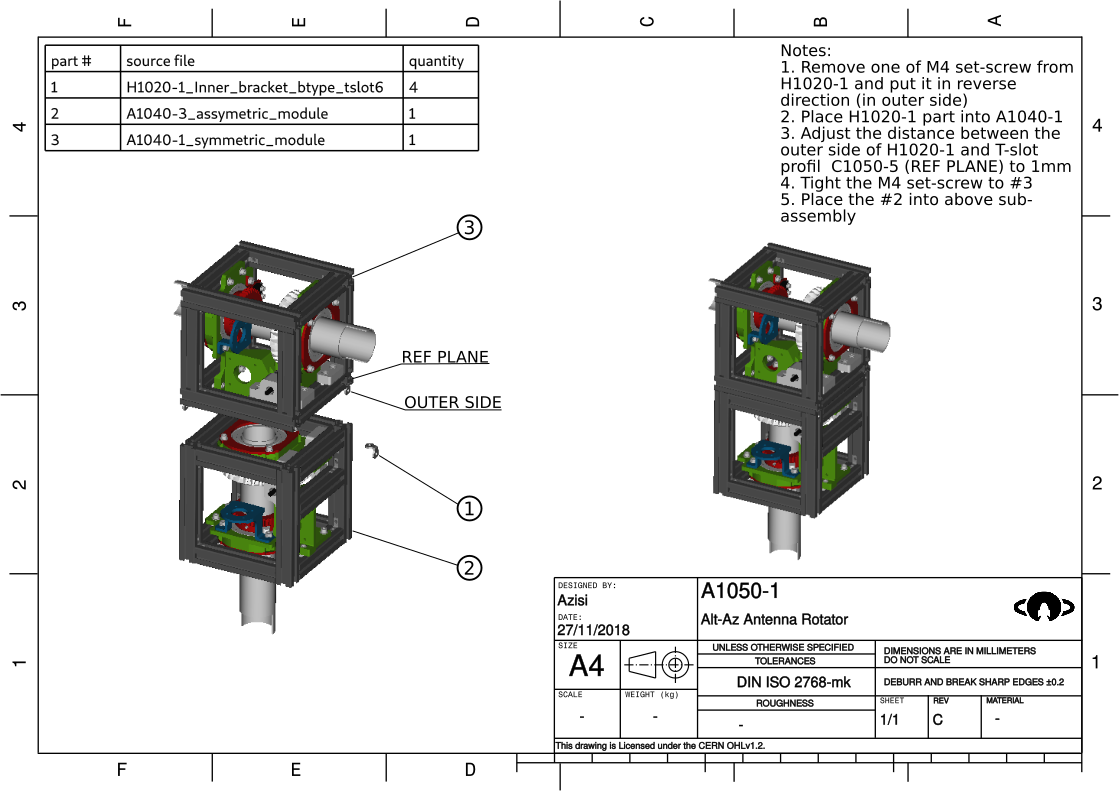
Figure 1: Assembly plan for the SatNOGS rotor system.[2]

Figure 2: Assembly of the electronics with an Arduino Uno and the step-motor power electroncis.[2]
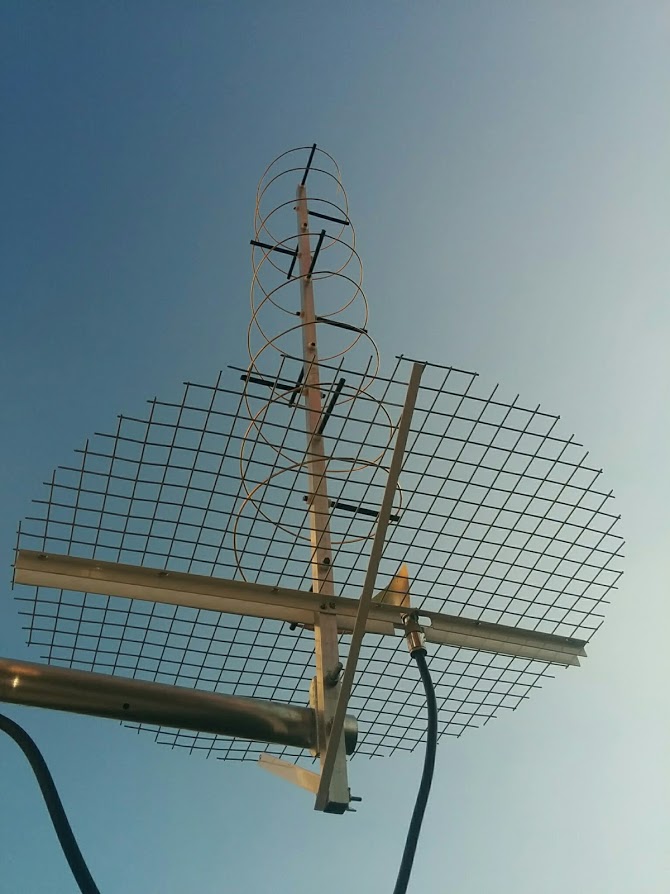
Figure 3: Helix antenna we are assembling at the moment.[4]
After successfully assembling our SatNOGS station – hopefully in end of August – we will integrate the SatNOGS software into our COSMOS environment. We will keep you updated about the progress.
Moreover, we would like to announce our new mission patch of “SpaceTeamSat1”, which was required to be adapted due to fabrication issues with the previous one. The next blog news will then present the first results of our COBC and EPS prototype PCBs and the first commissioning of our SatNOGS ground station. So stay online for further news about our firstly own-developed CubeSat “SpaceTeamSat1”.
![]()
References:
[1] RODOS on Wikipedia. Online: https://de.wikipedia.org/wiki/Rodos_(Betriebssystem)
[2] SatNOGS Wiki. Online: https://wiki.satnogs.org/Main_Page
[3] COSMOS Homepage: Online: https://cosmosc2.com/
[4] SatNOGS Antenna Assembly. Online: https://ohai.libre.space/