This article will serve as a quick overview of our record attempt at the BALLS event in Nevada. First things first: we are very proud of what we have managed to achieve. Not only was it an organizational challenge for us to launch a rocket in America, but The Hound itself was built as close to the electrical and mechanical production possibilities with the resources provided to us.
The project The Hound is the most complex and ambitious project our team has ever had. The original goal was to design and build a rocket that would be capable of reaching 42 km using the resources that a normal student rocket team had available. During the course of the project we realized that we would be able to achieve a higher altitude, which is why we set our goal to 100 km.
The biggest hurdle in reaching such an altitude is building an extremely compact and light rocket. We were able to create a fuel to overal mass ratio of over 50%, which is something unique for rockets in this class. The compact design of the rocket forced us to utilize a highly integrated boardelectronic and use state of the art materials and production techniques.
Due to the thermal requirements on the fincans, the fincans were made using 3D printed aluminium. Large parts of the airframe are made from high temperature resistant fiber composite materials and aluminium. The motor itself is part of the airframe in order to save on weight.
Design parameters and simulation:
Total:
- Mass: < 30 kg
- Length: 400 cm
Sustainer:
- Mass: ca. 10 kg
- Length: ca. 200 cm
- Diameter: 7.7 cm
Booster:
- Mass: ca. 20 kg
- Length: ca. 200 cm
- Diameter: ca. 10 cm
The Hound in the launch-tower. The rocket is guided over a length of 3.6 m between 4 steel tubes during lift-off. The nosecone is centered with a piece of styrofoam, which is pushed out during the launch.

Simulation of the record-attempt
Hazards, risks, and safety requirements:
When we plan rocket launches a large part of our time is spent on not only ensuring a reliable launch, but also on ensuring a safe launch. The safety requirements includes the safety of our team members that have to handle rocket fuel and the safety of the general public (spectators near the launch site and people in the area of where the rocket could theoretically land).
At the rocket launch event in the Black Rock Desert in Nevada there is a no-flight-zone in a radius of 15 nautical miles (28 km) and between 9 and 16 o’clock local time there were launch windows for rocket launches that exceed 150 000 feet (around 45 km). Using so called dispersion analysis one could ensure that rockets would not leave the no-flight-zone in order to not endanger any outsiders. Should The Hound tilt just before ignition of the upper stage there lies the risk of the rocket leaving this zone. Therefore there are clear criteria regarding the ignition of the upper stage: minimum altitude, minimum velocity, and a maximum angle from vertical.
In order to ensure the safety of our Space Team members that have to handle the rocket motors we have implemented a strict chain of independent safety mechanisms that do not allow an unwanted ignition of the rocket on the ground.
Power up of all the onboard electronics happens in several stages. First, the Remove Before Flight (RBF) pin is removed which powers up the electronics and then arms them (the igniter gets electrically connected to the ignition channel). In the ignition channel of the upper stage motor is our autonomous arming device (named Space Team Arming Device or STARM) which, in its default mode, separates the connection to the ignition channel. This device houses an accelerometer and detects the rockets lift off (but does not react on other events such as the rocket falling over). After lift off the ignition channel is opened for a 60 second time window and thus allows ignition of the motor.
During the launch event there were two accidents from two other teams where one person got severely injured. The cause of these accidents were due to the unwanted ignition of their upper stage motor which further highlights the importance of safely handling the pyrotechnics of two staged rockets. With our safety concepts we hope to reduce the risk as much as possible.
Why did the sustainer not ignite?
In a nominal flight, the whole rocket is accelerated to more than Mach 2 after the booster (a CTI N5800) is ignited.
The sustainer is then separated from the booster five seconds after lift-off by the ignition of a pyrotechnical charge, after which the sustainer coasts to an altitude of more than 10 km. It is of vital importance that the sustainer ignites when it is still supersonic. Nominal ignition therefore happens 20 s after lift-off at a speed of approximately Mach 1.1.
Onboard electronics check flight parameters (attitude/pitch, speed and altitude) and switch the ignition channel of the motor, which occurred according to the analysed flight data. However, due to our STARM (autonomous arming device, based on a lift-off detection) not being properly connected, the onboard computer was unable to ignite the motor. The function of the STARM is to prevent ignition of the motor whilst grounded while at the same time be as simple as possible. This simplicity prevented the discovery of the incorrect wiring during pre-flight testing.
As there was no point on our checklist to check for the correct wiring of the module, we merely checked whether or not it was plugged in.
Faulty wiring is perhaps the most frustrating mistake we can imagine as we are certain that the igniter would have otherwise fired since all other criteria were met. A firing of the motor igniter would not guarantee actual ignition as it is particularly difficult to ignite a rocket motor at this altitude due to the low ambient pressure. However, we did vacuum test our ignition system and are confident that it would have worked.

Schematic overview of our onboard-electronics
Why did the rocket only reach approximately 10% altitude?
The Hound is designed to push the limits of technological possibilities with every piece of the rocket having been optimised. The two-staged concept allows us to lose excess mass relatively fast, as mass is the most important optimisation parameter for high altitude flights. The motor of the booster had only one purpose: to catapult the sustainer to an altitude of low air resistance. The sustainer should then fly with an extremely high velocity (Mach 5 or 1.5 km/s) to the desired altitude of more than 100 km. If the sustainer is not ignited, it has only enough energy to reach an altitude of about 14 km (about the reached altitude). When the sustainer is ignited at an altitude of 10 km this changes drastically: the motor produces so much thrust that the rocket is accelerated with more than 40 g (40 times the acceleration due to gravity) and reaches a speed of 1.5 km/s after 4.5 s. Furthermore, the sustainer also loses about half of its mass; this is how it can reach the 100 km.

Simulation without ignition of the sustainer
What happened during the rest of the flight?
We were able to follow the flight of both stages from the ground with our in-house developed telemetry modules. The sustainer, as well as the booster, detected that they reached apogee and ejected the drogue parachutes by separating the rocket. The booster further opened the main parachute at an altitude of about 300 m, which was also planned for the upper stage. Unfortunately, there has been a malfunction in the relevant independent module. The log data of this module is inconclusive and further analysis is required to find out what has happened. The sustainer landed with approximately 40 m/s as the main parachute failed to deploy with double the expected mass whereas nominal speeds are 10 m/s, or 15 m/s with the doubled mass. The fincan sustained damage because of this, but the nosecone and electronics survived the ordeal. Furthermore, the booster is undamaged save for a few scratches as a result of being pulled over a few hundred meters of desert sand by the parachute.
Both stages were found based on GPS positions transmitted to the ground stations.
Measured Flight Data
V-max: 800 m/s, Mach 2,4
Alt.-max: 13000 m (42650 ft) AGL
Accel.-max: 29.5 g
Time to apogee: 48 s
Total flight time: 310 s
Both stages landed about 10 km from the launch site. The GPS position was transmitted by our LoRa-Telemetry modules during the whole flight.
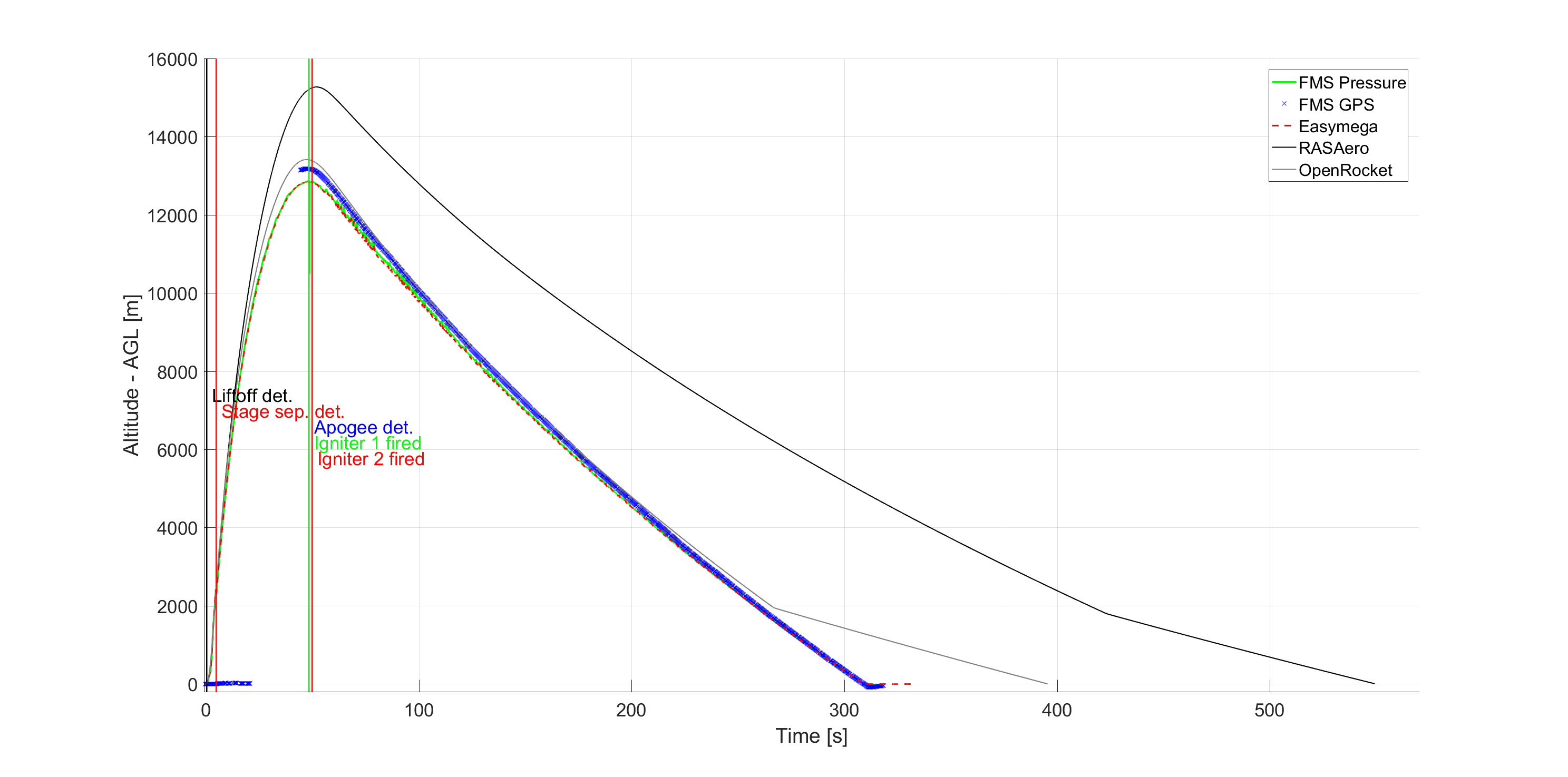
Measured altitude compared to the simulations with RASAero and OpenRocket. Igniter 1 and 2 eject the drogue-parachute (the main-chute is opened independently with a line-cutter).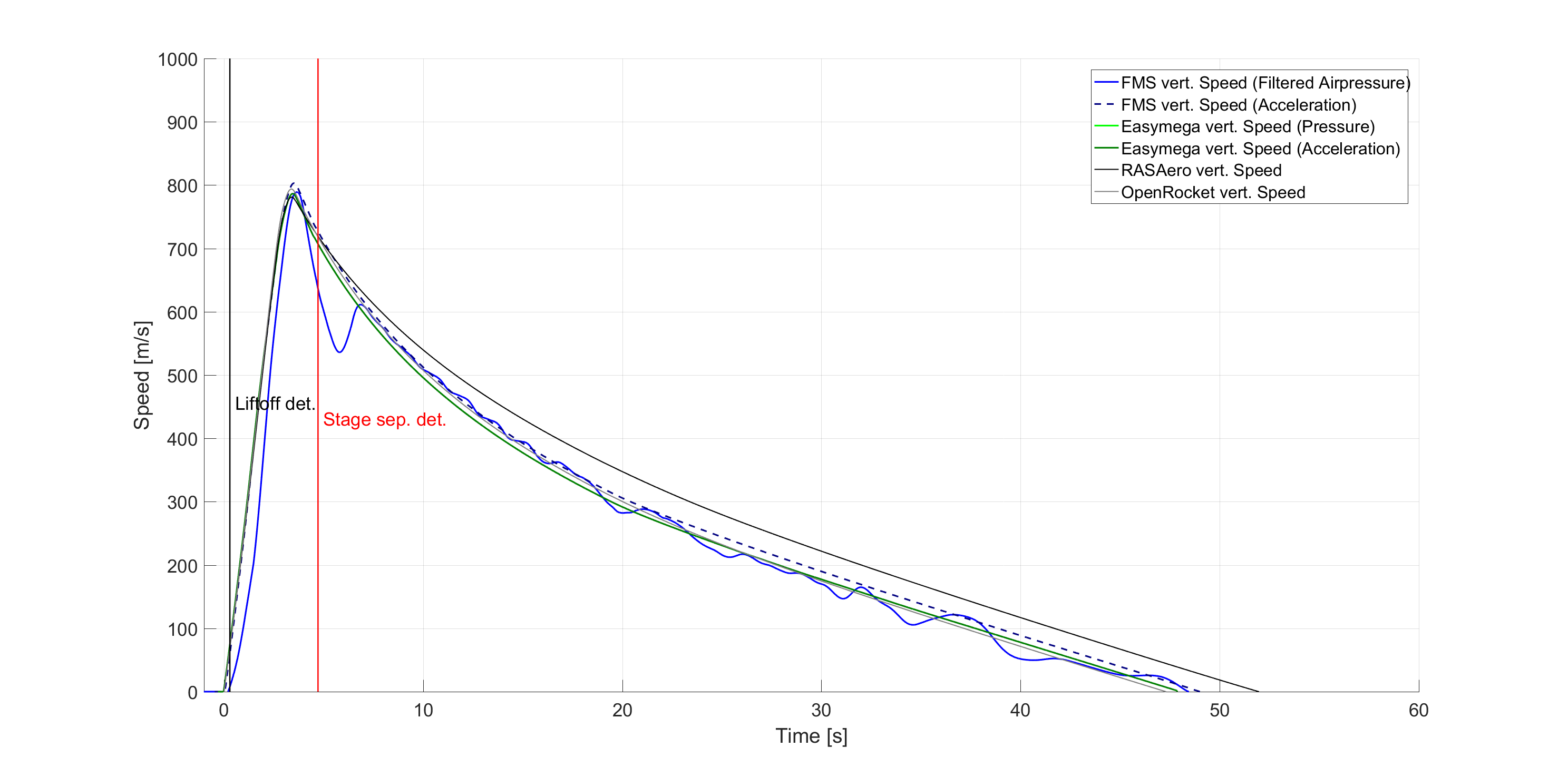
Calculated velocity compared to the simulations with RASAero and OpenRocket.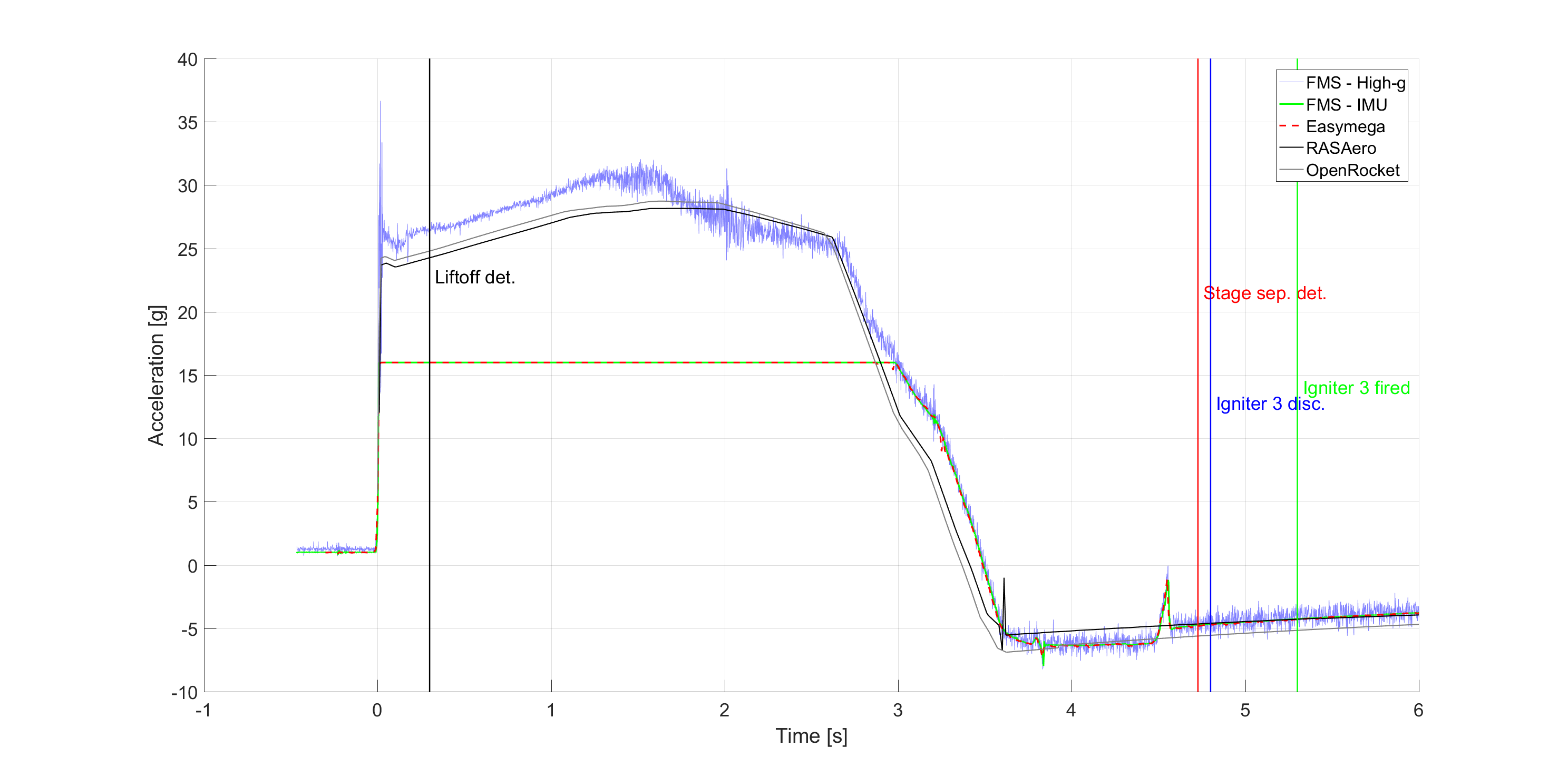
Measured accelerations in comparison to the simulations with RASAero and OpenRocket. Igniter 3 was intended to separate the two stages, but we also expected a possible drag separation. From the timeline above, showing separation, disconnection/separation of the igniter and the actual time of firing the igniter it is obvious that the staging happened because of aerodynamic drag and not because of the separation charge. The igniter was disconnected during the separation. This was expected and is no problem.
Videos
Pictures
Summary
[table id=16 /]
What happens next?
Further analysis and discussions are going to follow, to learn from our mistakes. We could gather a lot of experience and meet a lot of US-based rocketeers. Furthermore, we now have important and valuable flight-data which can be compared with our simulations and will help us to do further important tests with our rockets. We are still discussing if and when there will be a second attempt.
An important point for us is to find possible test and launch sites in the vicinity of Vienna, to be even better prepared in the future. We really hope that one of those facilities will be the training ground of the austrian army in Allentsteig (north of Vienna). This facility would offer a maximum altitude of about 15 km. Unfortunately all our requests so far were answered negatively. Further areas in Europe are very rare and often also connected with really high fees in the five to six digit euro range.